Function Application
‑604‑
5. The system stability can be improved by incorporating derivative time Td properly
(excessive proportion may cause interference and oscillation).
Figure 3‑58 Response‑time trend after incorporating Td
3.5 Application Control
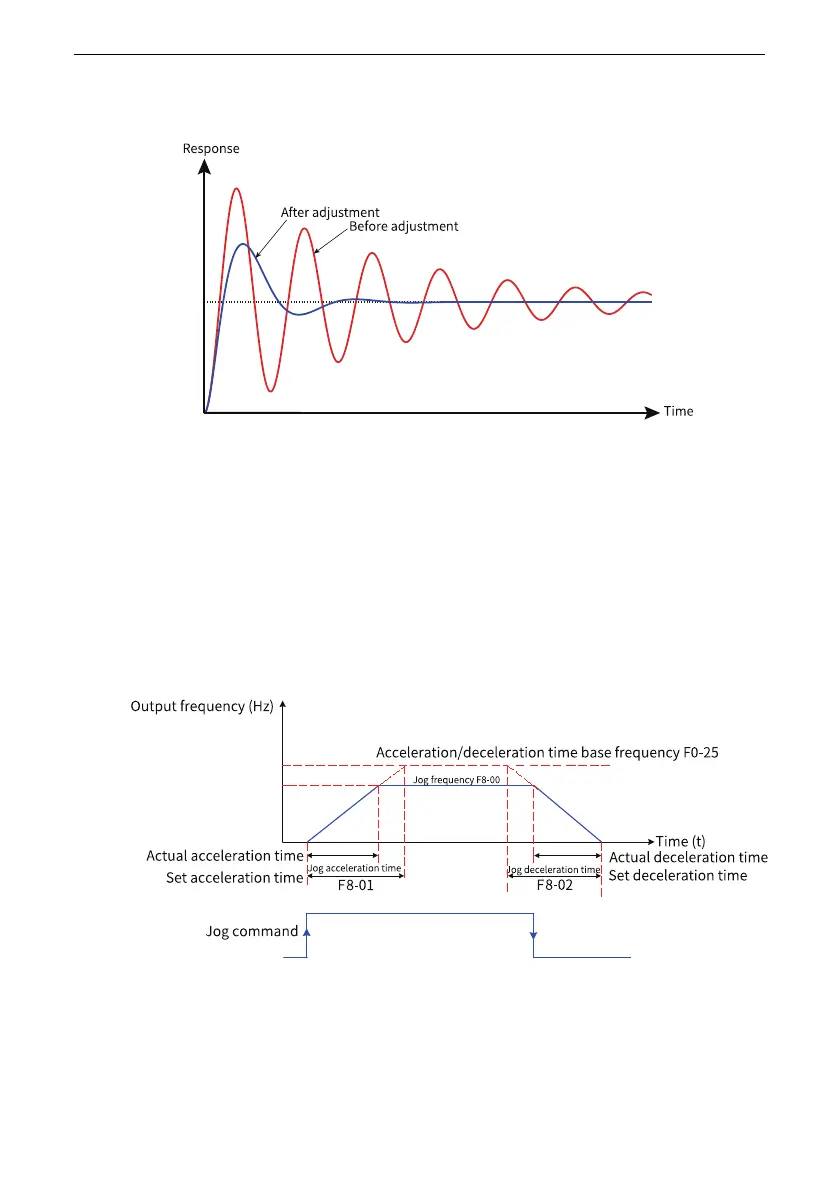
3.5.1 Jog Running
In some scenarios, the AC drive needs to run in jog mode for device testing. In jog
running mode, the startup mode is direct startup (F6‑00 is set to 0), and the stop
mode is decelerate to stop (F6‑10 is set 0). The following figure shows the relationship
between output frequency and acceleration/deceleration time in jog running mode.
Figure 3‑59 Jog running

 Loading...
Loading...








