9300 Servo PLC
System blocks
2.12 Free Codes (FCODE_FreeCodes)
2-46
9300ServoPLC EN 1.4
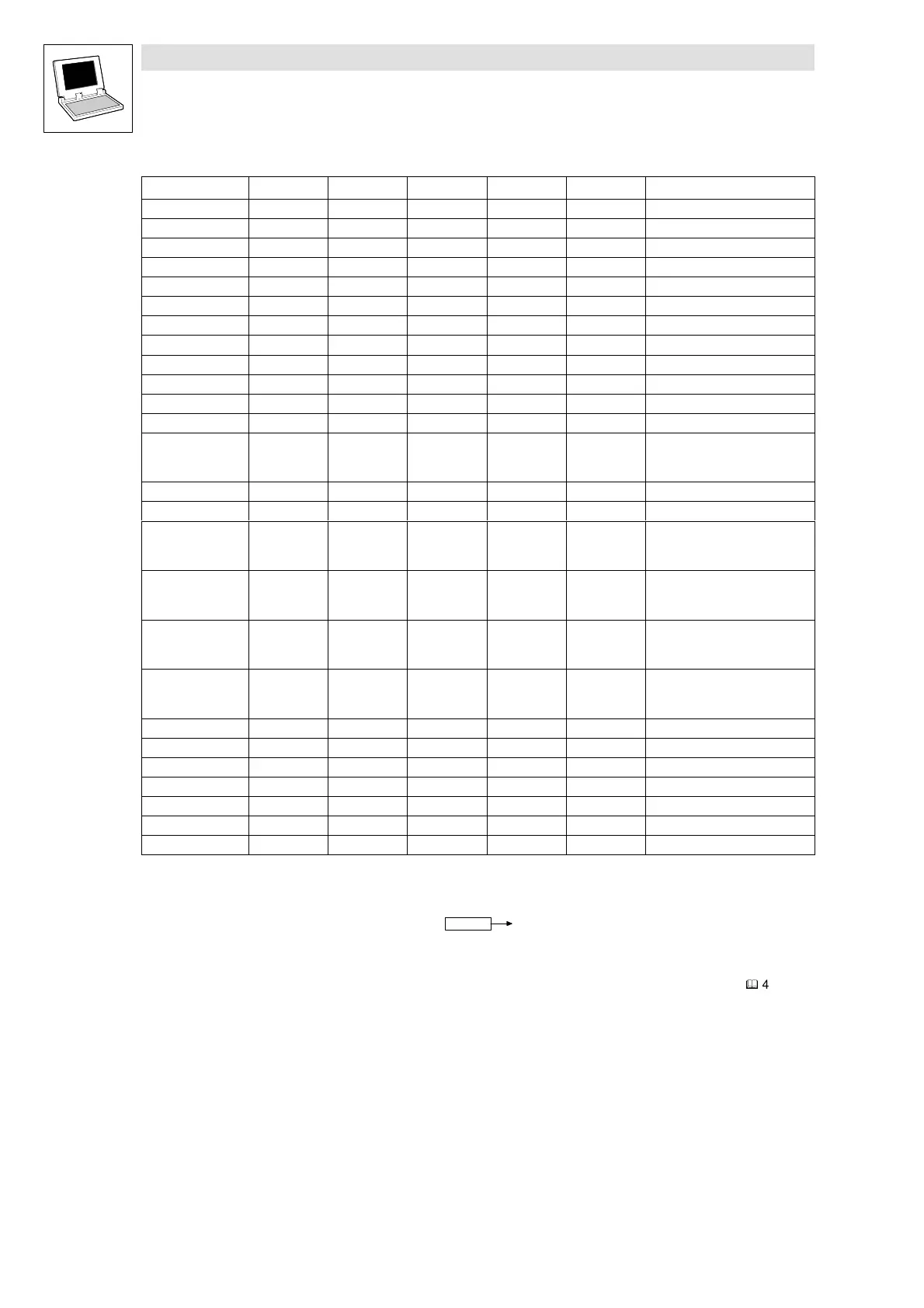
VariableName DataType SignalType Address DIS DIS format Note
FCODE_nC17_a Integer analog %IW141.0 - - default = 50 rpm
FCODE_nC26_1_a Integer analog %IW141.2 - - default = 0.00 %
FCODE_nC26_2_a Integer analog %IW141.3 - - default = 0.00 %
FCODE_nC27_1_a Integer analog %IW141.4 - - default = 100.00 %
FCODE_nC27_2_a Integer analog %IW141.5 - - default = 100.00 %
FCODE_nC32_a Integer analog %IW141.6 - - default = 1
FCODE_nC37_a Integer analog %IW141.7 - - default = 0 rpm
FCODE_nC141_a Integer analog %IW141.12 - -
FCODE_nC108_1_a Integer analog %IW141.8 - - default = 100.00 %
FCODE_nC108_2_a Integer analog %IW141.9 - - default = 100.00 %
FCODE_nC109_1_a Integer analog %IW141.10 - - default = 0.00 %
FCODE_nC109_2_a Integer analog %IW141.11 - - default = 0.00 %
FCODE_bC135Bit0_b
...
FCODE_bC135Bit15_b
Bool
...
Bool
binary %IX141.58.0
...
%IX141.58.15
- - default = 0
FCODE_nC141_a Integer analog %IW141.12 - - default = 0.00 %
FCODE_bC250_b Bool binary %IX141.13.0 - - default = 0
FCODE_bC471Bit0_b
...
FCODE_bC471Bit15_b
Bool
...
Bool
binary %IX141.14.0
...
%IX141.14.15
- - default = 0
FCODE_bC471Bit16_b
...
FCODE_bC471Bit31_b
Bool
...
Bool
binary %IX141.15.0
...
%IX141.15.15
- - default = 0
FCODE_nC472_1_a
...
FCODE_nC472_20_a
Integer
...
Integer
analog %IW141.16
...
%IW141.35
- - default = 0.00 %
C0472/3 = 100.00 %
FCODE_nC473_1_a
...
FCODE_nC473_10_a
Integer
...
Integer
analog %IW141.36
...
%IW141.45
- - default = 0
C0473/1,2 = 1
FCODE_dnC474_1_p Double Integer position %ID141.23 - - default = 0
FCODE_dnC474_2_p Double Integer position %ID141.24 - - default = 0
FCODE_dnC474_3_p Double Integer position %ID141.25 - - default = 0
FCODE_dnC474_4_p Double Integer position %ID141.26 - - default = 0
FCODE_dnC474_5_p Double Integer position %ID141.27 - - default = 0
FCODE_nC475_1_v Integer velocity %IW141.56 - - default = 0
FCODE_nC475_2_v Integer velocity %IW141.57 - - default = 0
Function
• In Abb. 2-27 you will find code names in You can configure these codes. Their
values are assigned directly to the corresponding variables.
– A fixed scaling routine relates the codes to the variable values.
– In the code table, you can find the options that can be set, and the Lenze settings.
(
^
4-15)
• Example:
– You can enter a defined speed (rpm) through C0017. This value is assigned to the variables
FCODE_nC17_a
withthedatatype“Integer”.
 Loading...
Loading...



