327
APPENDICES
APPEN
DIX
Appendix 5 Differences Between LCPU and QnUCPU
Appendix 5.2 Precautions for Utilizing Programs
Appendix 5.2 Precautions for Utilizing Programs
This section describes precautions for applying a QnCPU program to the LCPU.
(1) I/O assignment
Since the LCPU is equipped with built-in functions, the start I/O number assigned by default is different from that
of the QnCPU. Therefore, to use the programs of the QnCPU, I/O assignments must be changed even if the
configuration of the module has been the same. Change the start I/O number of the connected module in the I/O
Assignment tab of the PLC Parameter dialog box according to the program. ( Page 297, Appendix 1.2(9))
(2) Instructions
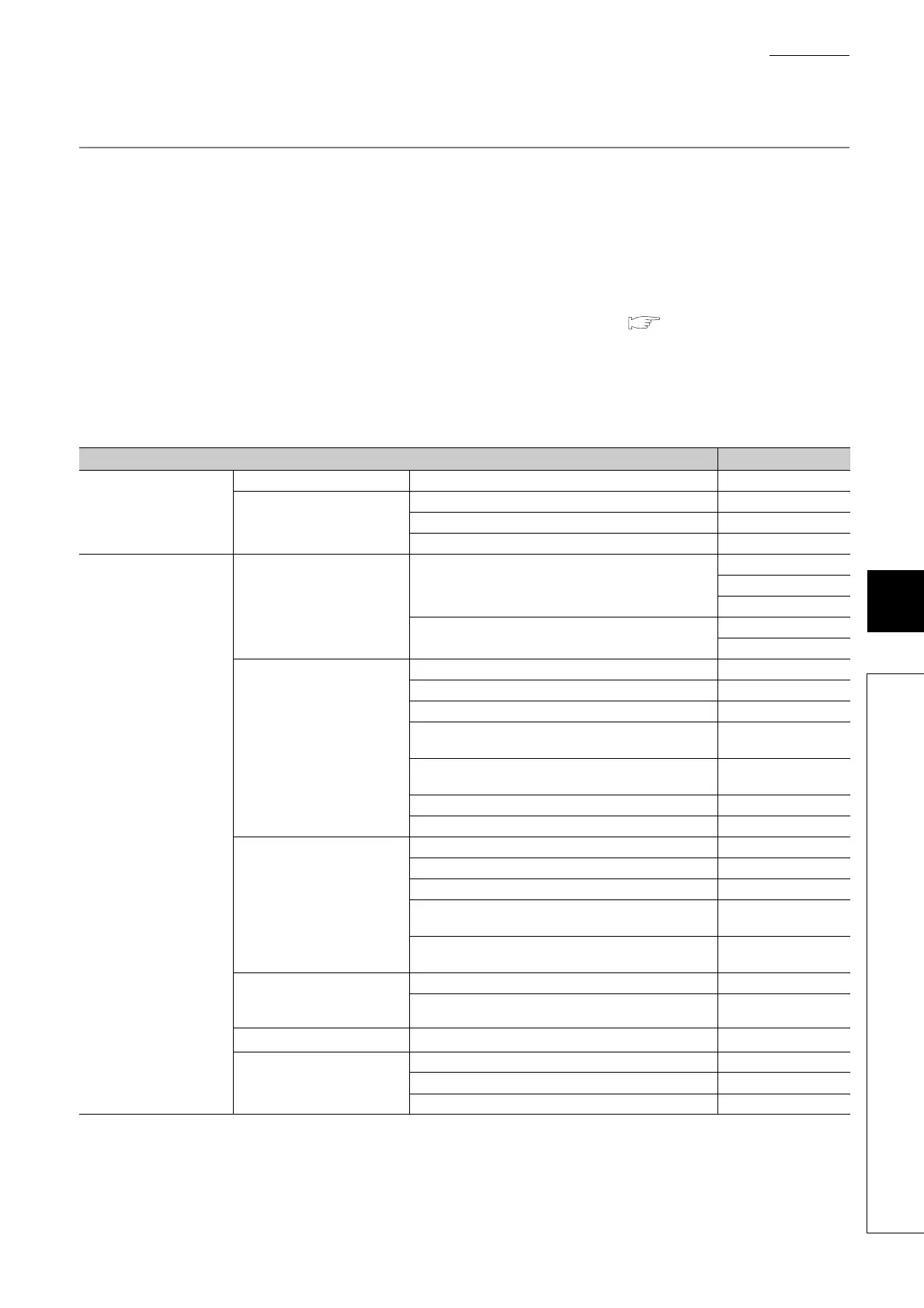
Some instructions among those applicable to the QnCPU cannot be used in the LCPU. The following table shows
the instructions not applicable to the LCPU.
*1 Applicable to the Q00UCPU, Q01UCPU, and Q02UCPU.
*2 Applicable to the QnUD(E)CPU.
Classification Instruction
Application instruction
File register switching instruction File set QDRSET(P)
Other instructions
Reading routing information S(P).RTREAD
Registering routing information S(P).RTWRITE
File register high-speed block transfer RBMOV(P)
Multiple CPU dedicated
instruction
CPU module shared memory
access instruction
Write to host CPU shared memory
S(P).TO
TO(P)
DTO(P)
Reading from the CPU shared memory of another CPU
FROM(P)
DFRO(P)
Motion CPU dedicated
instruction
*1
Motion SFC program startup request S(P).SFCS
Servo program startup request S(P).SVST
Axis speed change during positioning and JOG operation S(P).CHGV
Torque control value change during operation and suspension
in real mode
S(P).CHGT
Current value change of halted axis/synchronized encoder/
cam axis
S(P).CHGA
Write device data to motion controller S(P).DDWR
Read device data from motion controller S(P).DDRD
Multiple CPU high speed bus
compatible Motion CPU dedicated
instruction
*2
Motion SFC program startup request D(P).SFCS
Servo program startup request D(P).SVST
Axis speed change during positioning and JOG operation D(P).CHGV
Torque control value change during operation and suspension
in real mode
D(P).CHGT
Current value change of halted axis/synchronized encoder/
cam axis
D(P).CHGA
Multiple CPU high speed bus
compatible NC dedicated
instruction
*2
ATC dedicated instruction D(P).ATC
Rotation control instruction D(P).ROT
Another CPU access instruction
*1
Other CPU interrupt program startup S(P).GINT
Multiple CPU high speed bus
compatible other CPU access
instruction
*2
Writing devices to another CPU D(P).DDWR
Reading devices to another CPU D(P).DDRD
Other CPU (motion controller) interrupt program startup D(P).GINT

 Loading...
Loading...








