PARISON CONTROLLER
moog
Moog Italiana srl - Bergamo MAN145-UM-D01A-EN 71
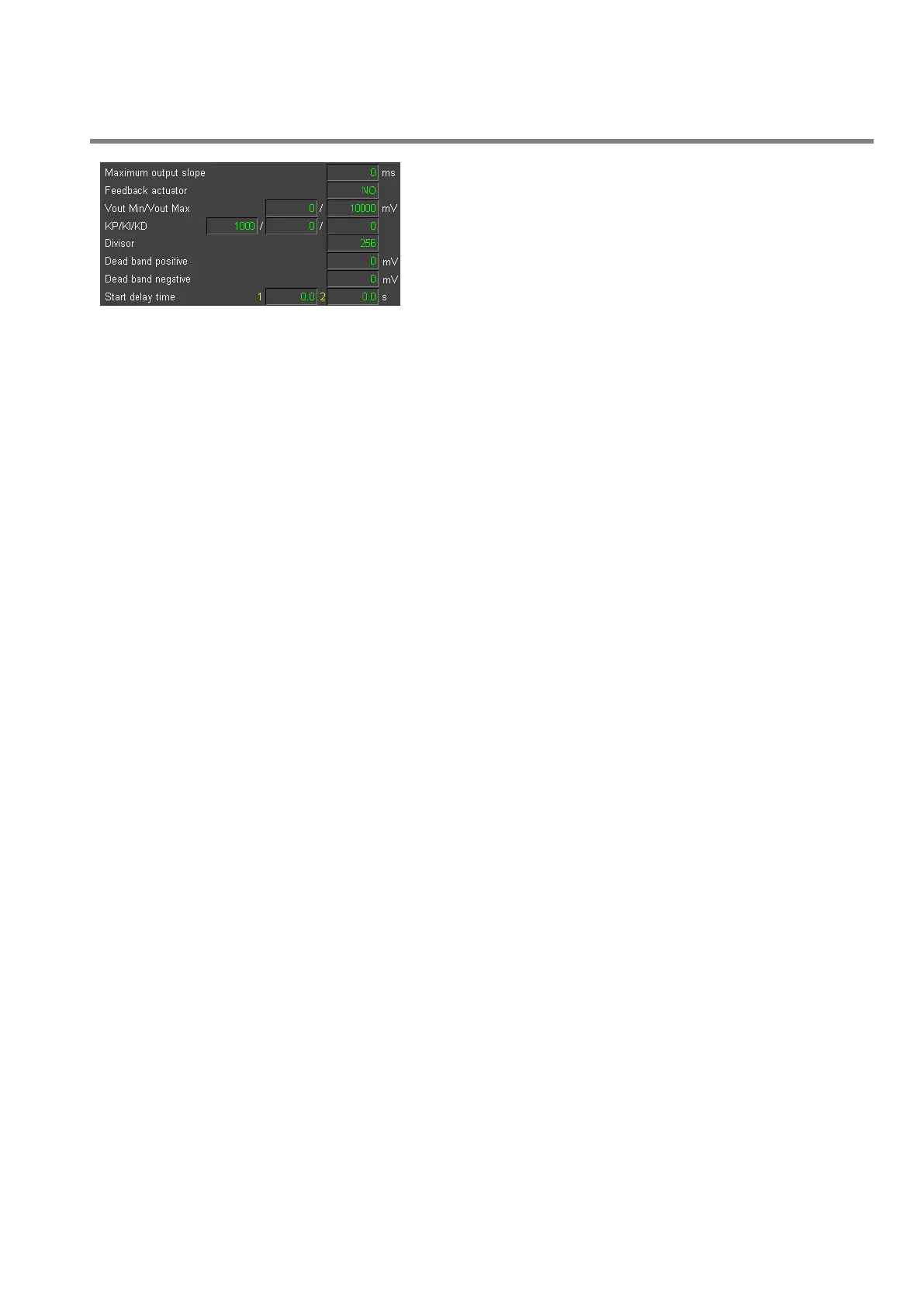
Maximum output slope: Minimum time for the maximum
excursion of the head (from all open to all close). It allows us to
define a ramp for the maximum variation of the analog output. In
this way very fast movements of the head are not allowed. If the
time is 0 every movement is free. With a value of 1 second, for
example, the position command increment will be 20000 mV/s.
Every movement will be performed according to the calculated
ramp.
Feedback actuator: Select if the actuator has a feedback transducer (intelligent actuator).
Vout Min/Vout Max: (only if feedback actuator is YES). It allows to choose between which values the intelligent
actuators has to work. The default parameters are 0 / 10000 [mV]
KP gain: Proportional gain. Range: 0...10000.
KI gain: Integral gain. Range: 0...10000.
KD gain: Derivative gain. Range: 0...10000.
Divisor: It allows to choose the divisor of the formula to calculate the output command: the divisor allows to insert
the parameters PID with different resolutions.
OUT = (KP * DEV + KI * (integral add DEV) + KD * (derivate DEV)) / DIV
DEV=Actual Value[%] - Setpoint[%]
Calibration Mode 100%= 20000 mV
Work Mode 100%= Vup – Vdown
Dead band positive: Value added to the output already calculated by the PID controller to compensate the positive
dead band. Range: 0...+5000 mV or max value mA.
Dead band negative: Value subtracted from the output already calculated by the PID controller to compensate the
negative dead band. Range: 0...+5000 mV or max value mA.
Start delay time: delay time on movement starting (1). The second time (2) refers to the profile 2 with alternate
profiles.
4.6.6 Head Setup for PWDS
The setup page for channels managing the PWDS function is almost identical as the one for normal parison
control: the only difference is that the configuration of the die type, with the four big icons in the middle of the
page, is not present; for the same reason also the function keys F3 to F6 are gray.
Also the second Start delay time, the one used in case of alternated profiles, is not present

 Loading...
Loading...