T200 User's Manual SECTION 7: WINDRIVE
PAGE 7-36
Torque Offset: The Torque Offset is used to bias the torque of the motor in one direction of rotation. It can be positive
or negative. It is specified in units of Nm or lb-in.
Period: The Period determines the time taken for one cycle of operation for one cycle of the Function Generator. This is
specified in seconds.
Duty Cycle: The Duty Cycle determines the length of time the Speed (Velocity Mode) or Torque Amplitude (Torque
Mode) is of a positive polarity and is expressed as a percentage of the Period. For the remainder of this time, the Speed
or Torque Amplitude is negative. A Duty Cycle of 50% means that Speed or Torque Amplitude have positive and
negative polarity for the same length of time during one Function Generator Period.
Distance: The Distance is used when the T200 is in Position Mode. The T200 generates an S-shaped position profile,
with maximum acceleration, speed and end position determined by the Function Generator's Acceleration, Speed
Amplitude and Distance (in revolutions) parameters, respectively.
Acceleration: The Acceleration is used by the Profile Generator in Position Mode as described under the Distance
parameter and specified in radiants / second
2
.
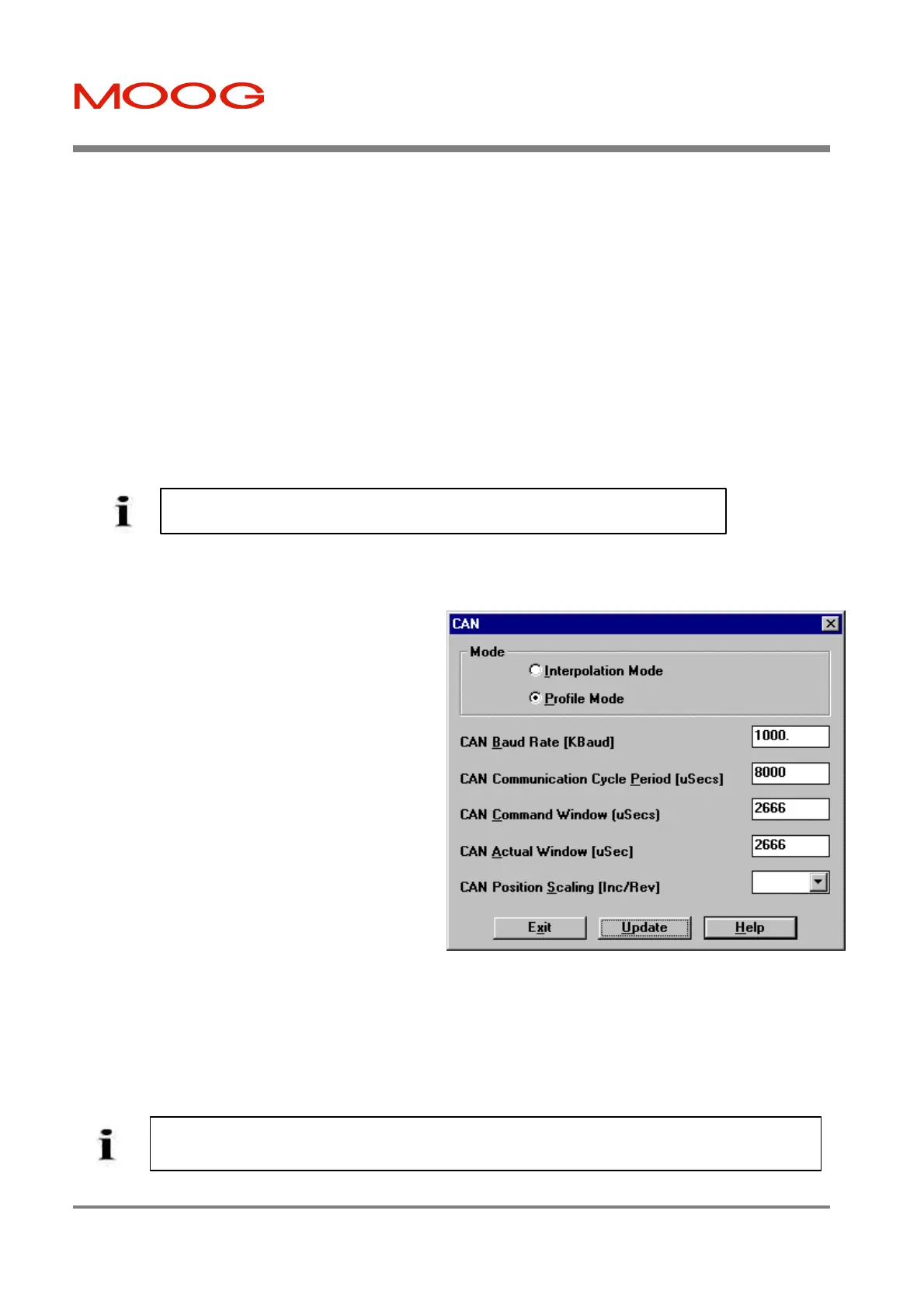
c) CAN Reference
Figure 7.37: CAN Dialog Box
CAN Position Scaling: The user can select 16384, 8192 or 4096 CAN increments per motor shaft revolution. This
scaling is applied to all CAN position variables.
The Controller Area Network (CAN) interface mode
is described in Section 9. Enter this dialog via
Set-up from the Reference Source dialog.
Mode: The Mode field selects between CAN Profile
Mode and CAN Interpolation Mode.
CAN Baud Rate: The user can choose the baud rate
from the following selection: 1000kBaud,
800kBaud, 666kBaud, 500kBaud, 400kBaud,
320kBaud, 250kBaud, 200kBaud, 160kBaud,
125kBaud, 100kBaud, 80kBaud, 50kBaud,
40kBaud, 20kBaud, 10kBaud, 5kBaud.
CAN Communication Cycle Period: The CAN
cycle period (time between SYNC messages) is
entered via this window. Units are microseconds.
CAN Command Window: The time from the
SYNC message arrival to the time when the T200
checks for COMMAND messages is called the
Command Window. Units are microseconds.
CAN Actual Window: The time from the
transmission of the ACTUAL message until the next
SYNC message is called the Actual Window. Units
are microseconds.
NOTE - The operation of the Function Generator is specified in detail in Section 6.5.
NOTE - The operation of the CAN Interface is specified in detail in other MOOG documents. These
can be provided by the MOOG sales outlets listed in Section 11 on request.
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com