T200 User's Manual SECTION 8: HAND-HELD-TERMINAL INTERFACE
PAGE 8-8
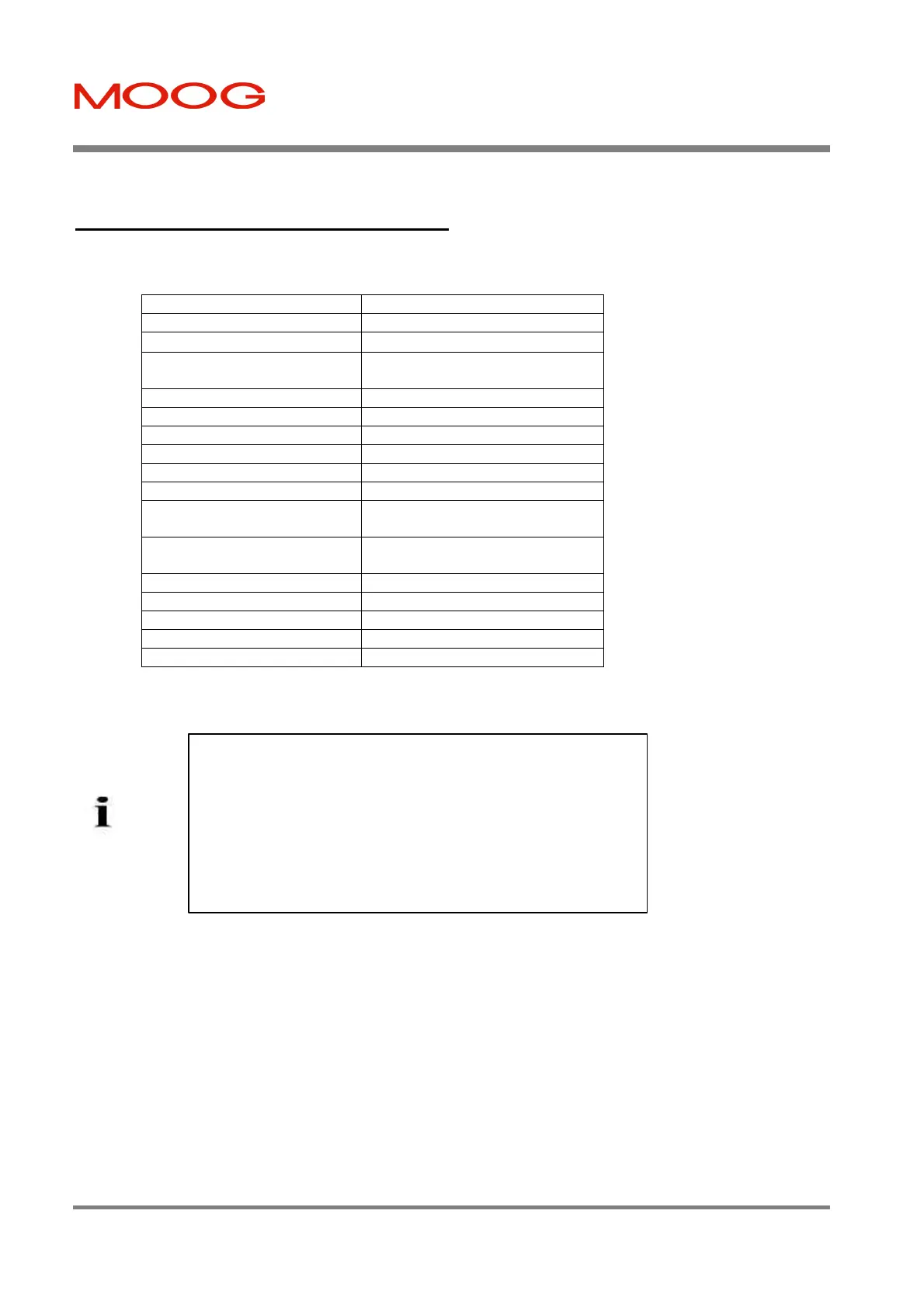
8.2.3 Non-Standard Motor Configuration
Applications employing non-standard motor models (other than the G4XX series) require the data listed in Table 8.1
PARAMETER UNITS
Torque Constant (Kt) Nm/Ar.m.s. or Nm/Aeff
Stator Resistance (Rtt)
Ohms (Ω)
Quadrature Axis Motor
Inductance
Millihenries (mH)
Direct Axis Motor Inductance Millihenries (mH)
Nominal Motor Speed RPM
Maximum Motor Speed RPM
Peak Rated Motor Current Ar.m.s. or Apeak
Current Loop Gain 0 to 15
Number of Motor Poles Usually 8 or 12 for Moog motors
Rated Continuous Motor Ø
Current (Ic)
Ar.m.s. or Apeak
Rated Peak Motor Ø
Current (Ip)
Ar.m.s. or Apeak
Motor Nominal Speed RPM
Current Loop Gain 0 to 15
Motor Observer Inertia (Jm) kg-cm
2
Resolver Pole Pairs Usually 2 for Moog motors
Motor Thermistor True or False
Table 8.1:- Non-Standard Motor Parameter Set
To configure for a non-standard motor, proceed with drive initialization as outlined previously. Use the [SNM]
command. Enter the non-standard motor model number when prompted for the motor model number. After confirming
the model number entered, the servo-drive will recognize a non-standard motor model number and prompt for entry of
the motor parameters listed above.
- The following conversions are useful for motor parameters:
Kt (Nm/ Ar.m.s.) = .113 * Kt (lb-in/Ar.m.s.)
Ic (Ar.m.s.) = Tc (Nm) / Kt (Nm/Ar.m.s.)
Ip (Ar.m.s.) = Tp (Nm) / Kt (Nm/Ar.m.s.)
where:
Ic = Rated Continuous Motor Phase Current
Tc = Rated Continuous Motor Torque
Ip = Rated Peak Motor Phase Current
Tp = Rated Peak Motor Torque
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com