●Signal name and description
Name
Signal Name
Description
Speed-Switching Format
Speed-Stepping Format
Input
START Start
Inputs the positioning START signal. Positioning begin
when this signal switches from OFF to ON.
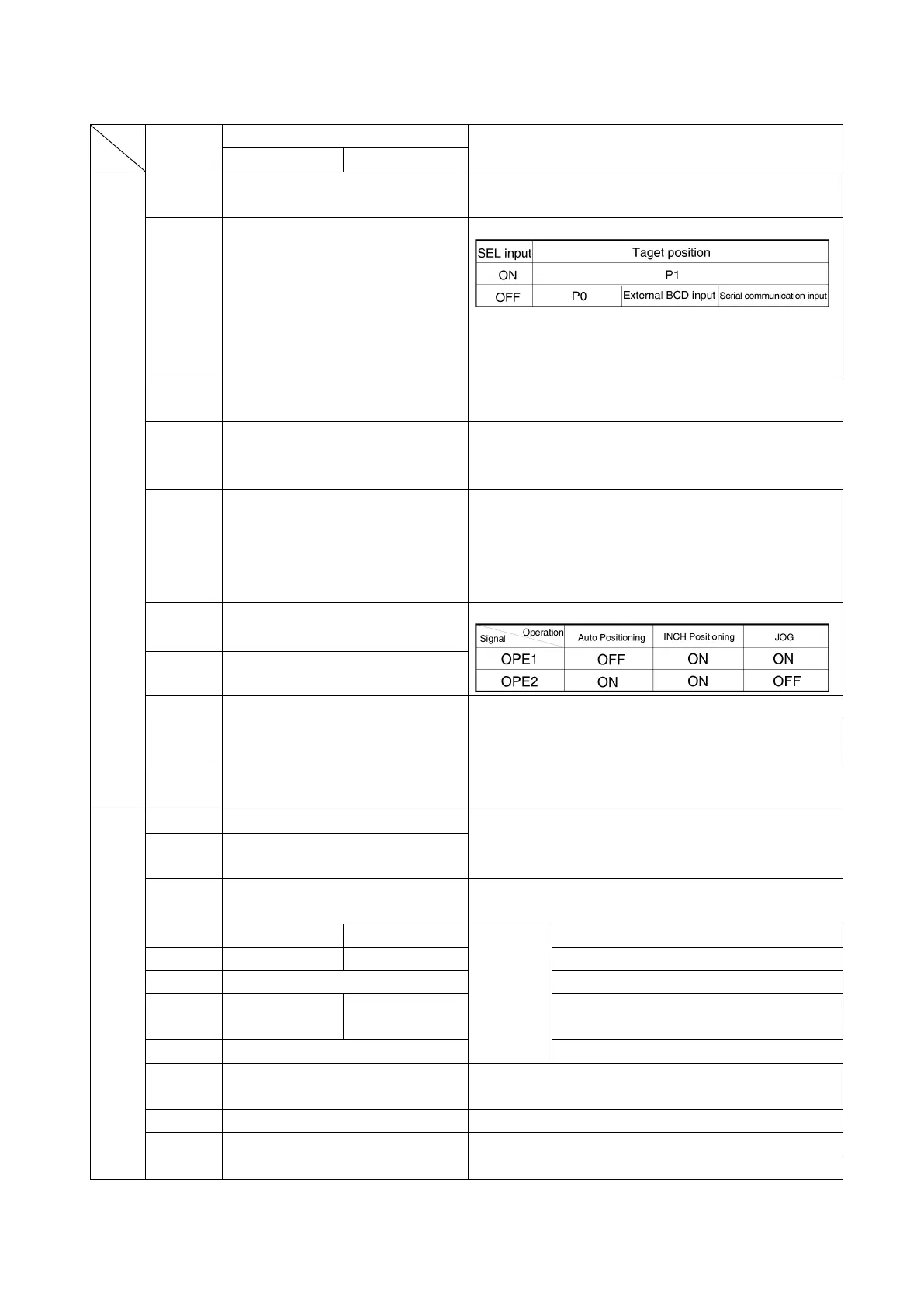
SEL Target stop position select
Selects the target position for automatic positioning.
The P0 and P1 positioning target positions are specified in
the program. The SEL input OFF target position is
determined by the parameter No.40 setting.
STOP Stop
Stops the positioning operation. Positioning stops when this
signal is OFF (brake-contact input).
PRE1 PRE input 1
This is the current position preset 1 input. When switched
from OFF to ON, travel direction is identified and a current
position preset is performed.
PRE2 PRE input 2
This is the current position preset 2 input. When switched
from OFF to ON, travel direction is identigied and a current
position preset is performed.
When “machine position confirmation” function is selected,
the current position is compared with the reference position.
OPE1 Operation selection 1
Selects the positioning operation.
OPE2 Operation selection 2
Used to cancel an error status.
F/R FWD / RVS selection
Selects the travel direction for INCH and JOG operations.
(ON: Reverse, OFF: Forward)
LOS Low- speed
Selects the travel speed for INCH and JOG operations.
(ON: High-speed, OFF: Low-speed)
Output OPE1 Operation selection answerback 1 Outputs the currently selected positioning operation. The
output ON/OFF sign
als are identical to the OPE1 and OPE2
input signals.
OPE2 Operation selection answerback 2
READY System ready
Switches ON when the system and sensor are normal
(in RUN and TEST mode).
Positioning
control
outputs
RVS Reverse Reverse,low-speed
Reverse
HIS High-speed High-speed
LOS Low-speed Medium-speed
Low-speed at speed switching, or
medium-speed at speed additions.
INP In-Position
Switches ON when current position enters the target
position’s in-position zone.
RUN Positioning in progress Switches ON while positioning is in progress.
Switches outputs OFF when an operation error occurs.
Outputs the limit switch signals.
 Loading...
Loading...
