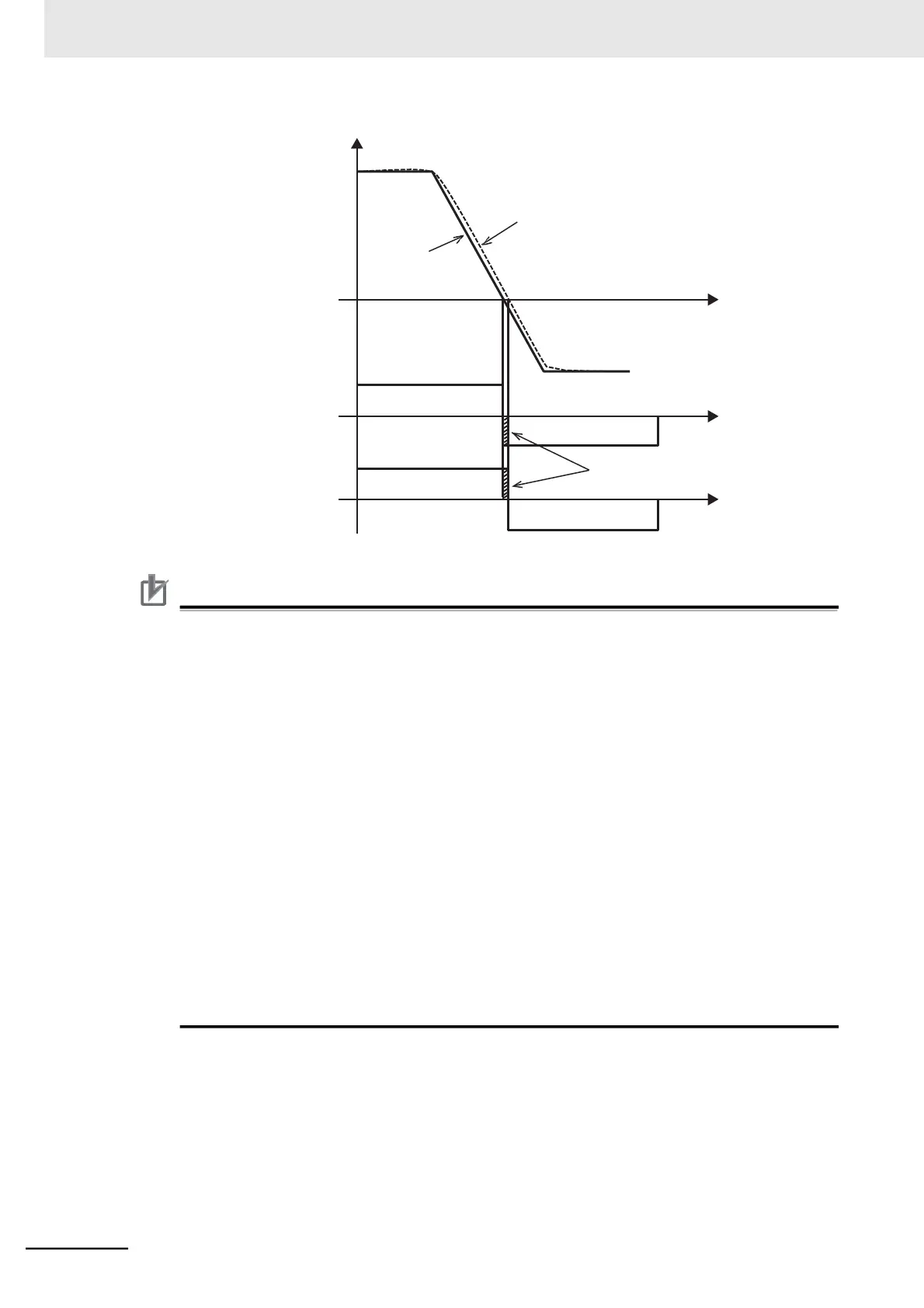
Frequency/
Speed
Output frequency/
Actual speed
Rotation direction judge
based on single-phase
pulse (P004 = 00)
Actual rotation direction
Precautions for Correct Use
•
The actual load may not follow the output frequency during deceleration if, for example, the
load inertia is large. If this occurs, the speed becomes higher than the creep speed around
the target position, and the stopping accuracy degrades.
When the speed decelerates from the creep speed, also the stopping accuracy degrades.
Use the following methods to improve the stopping accuracy.
1.
Set a longer deceleration time or increase the Creep Speed Moving Amount (P014).
2.
Set the Creep Speed Setting to the lowest possible value.
3.
For V/f control, adjust the V/f Control With Speed Feedback Slip Compensation Propor-
tional Gain / Integral Gain (H050/H051) to improve the speed following performance.
4.
Switch to sensorless vector control.
•
DC injection braking does not work during stop if the simple position control function is used
to control the motor via the RUN command from the Digital Operator (A002 = 02).
To perform DC injection braking after the motor stops, set A002 to other than 02 (Digital
Operator).
•
Under position control, the Creep Speed Moving Amount (P014) setting will be ignored if the
amount of movement is smaller than the set value and the motor moves to the target position
at the creep speed.
If the amount of movement is too small to reach the creep speed, the motor makes a triangu-
lar movement.