6 Vector Control and Applied Functions
Multi-function Compact Inverter 3G3MX2-EV2 User’s Manual (I666-E1)
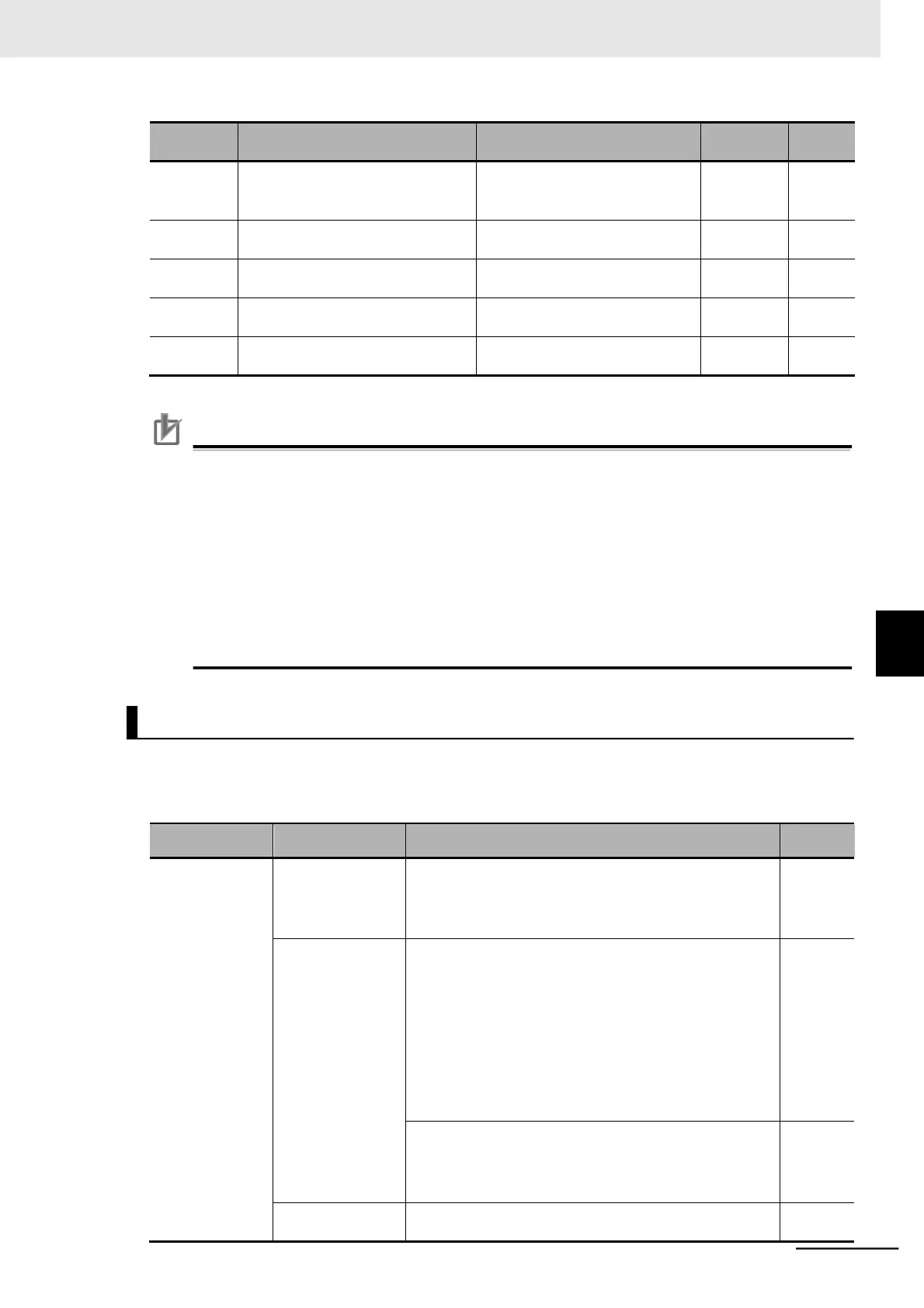
PM Motor Starting Method Selection
00: Disabled
01: Initial pole position estima-
tion enabled
PM Motor Initial Pole Position Esti-
mation 0V Waiting Times
PM Motor Initial Pole Position Esti-
mation Detection Waiting Times
PM Motor Initial Pole Position Esti-
mation Detection Times
PM Initial Pole Position Estimation
Voltage Gain
Precautions for Correct Use
•
For a PM motor, even if the DC injection braking function is enabled, the regenerative energy
is returned to the inverter. If an overvoltage trip occurs during DC injection braking or during
deceleration, consider to use one or more braking resistors.
•
If a holding brake is provided, release the brake before running the motor.
If this timing is not correct, the PM motor will stall.
•
To improve the control performance of the PM motor, be sure set the Carrier Frequency
(b083) to 8.0 kHz or higher.
•
Derating of the output current may be required depending on the installation environment
and the Carrier Frequency (b083) setting. For derating of each inverter model, refer to A-1
Derating on page A-2.
Adjust the PM motor as shown in the table below depending on its operation status and the phenome-
non.
Motor rotates in
reverse or rotates
slightly.
The motor may rotate slightly in magnetic pole alignment
during startup.
Enable the initial pole position estimation function (refer to
P. 6-66) to suppress the rotation speed during startup.
If the motor stalls during startup, a large current may flow,
which causes an overcurrent trip.
Increase the PM Motor Starting Current value.
Motor stalls or
causes an overcur-
rent trip.
Increasing the PM Motor Starting Current value improves
the magnetic pole alignment during startup, which results
in an increase in the startup torque.
However, setting this parameter to an excessively large
value may cause an overload. Check the value in the Elec-
tronic Thermal Load Rate Monitor (d104).
Increase the PM Motor Starting Time value.
This increases the time during which the starting current
flows to improve the magnetic pole alignment during
startup, which results in an increase in the startup torque.
Motor starting time
is too long.
Enable the initial pole position estimation function (refer to
P. 6-66) and shorten the motor starting time.
6-8-6 Adjustment of PM Motor Mode Settings