Multi-function Compact Inverter 3G3MX2-EV2 User’s Manual (I666-E1)
This function limits the PID output to within the variable range defined based on the target value.
To use this function, set the PID Variable Range Limit (A078) as a percentage of the maximum fre-
quency. Then, the output frequency will be limited to within a range of Target value ± (A078).
When the PID Selection (A071) is set to 01 (Enabled) or 02 (Enabled (Reverse output enabled)), this
function is enabled.
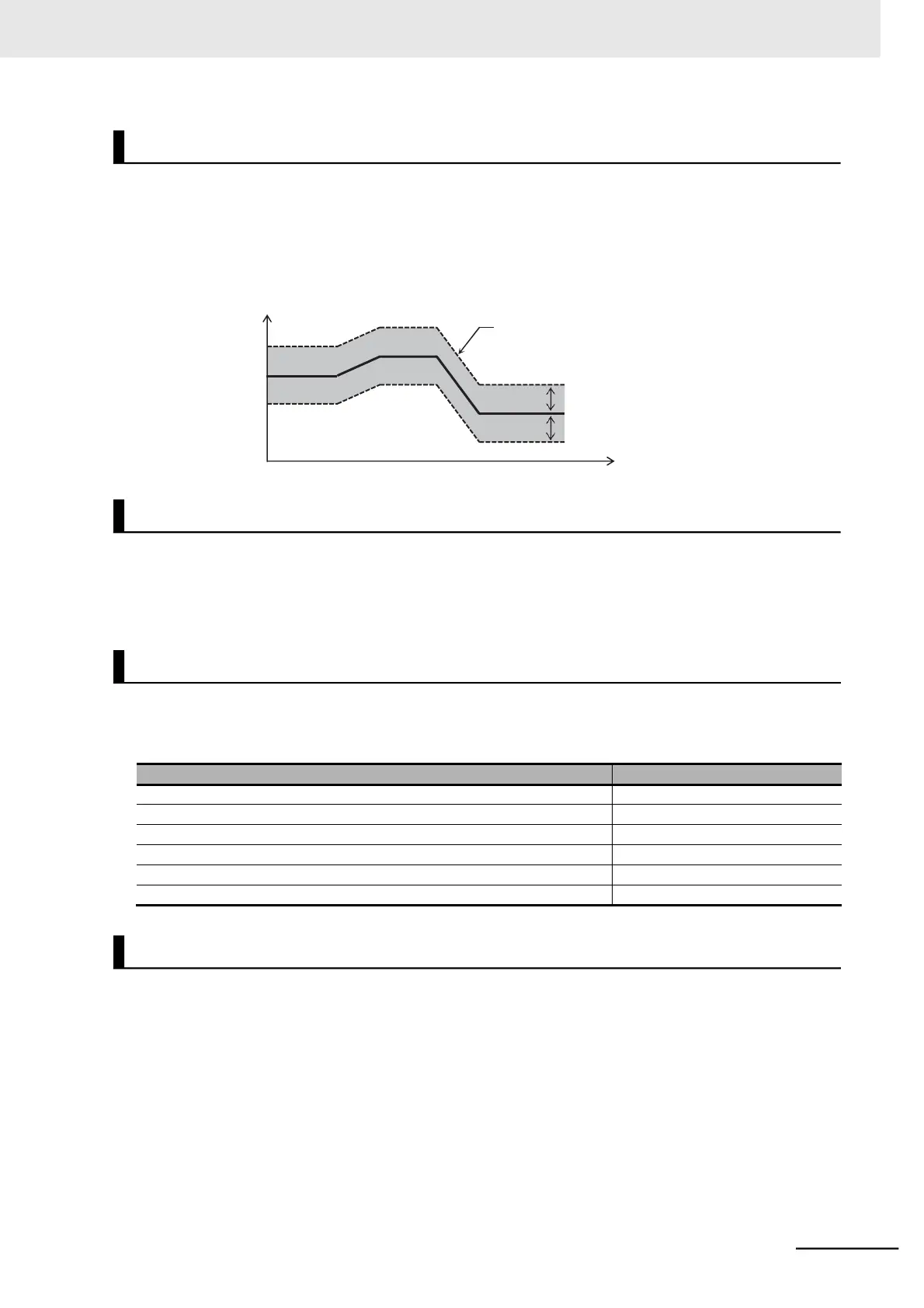
PID output [%]
PID target value
PID output range
PID Variable Range Limit (A078)
PID Variable Range Limit (A078)
Time [s]
Under normal PID control (A071 = 01), the frequency reference to the inverter will be limited to 0 Hz if
the result of PID operation is a negative value. However, when the PID Selection (A071) is set to 02
(Reverse output enabled), reverse output is enabled for the inverter if the result of PID operation is a
negative value.
If the PID function does not provide a stable response, adjust the appropriate gain setting according to
the table below.
Changes in target value are not reflected quickly on feedback value.
Increase PID P Gain (A072).
Changes are reflected quickly on feedback value, but not stable.
Decrease PID P Gain (A072).
Target and feedback values do not match quickly.
Decrease PID I Gain (A073).
Feedback value fluctuates unstably.
Increase PID I Gain (A073).
Increasing PID P Gain does not improve response speed.
Increase PID D Gain (A074).
Increasing PID P Gain results in fluctuating and unstable feedback value.
Decrease PID D Gain (A074).
You can set the PID Deviation Excessive Level (C044) for PID control. This inverter can be configured
to output this signal to a multi-function output terminal if the PID deviation ε reaches the level set in
C044 or higher. The inverter will not shut off its output (trip), however.
Allocate the Multi-function Output 11/12 Selection (C021/C022) or the Multi-function Relay Output (AL1,
AL2) Function Selection (C026) to 04 (OD).
Set C044 in units of percentage as 100% of the 1st/2nd Maximum Frequency (A004/A204).
PID Deviation Excessive (OD)