Parameter Description
torque limit turns to Torque reference, and speed reference turns to speed limit. When return
torque control back to speed control, Torque reference turns to torque limit, and speed limit turns
to speed reference. If you operate the switch of speed control/ torque control, please be in the
mode of closed-loop vector speed control (P.300=4) and set P.400=0. If you set P.400=1 and
external terminals=55 at the same time, the switch function will be invalid and only torque-control
operates.
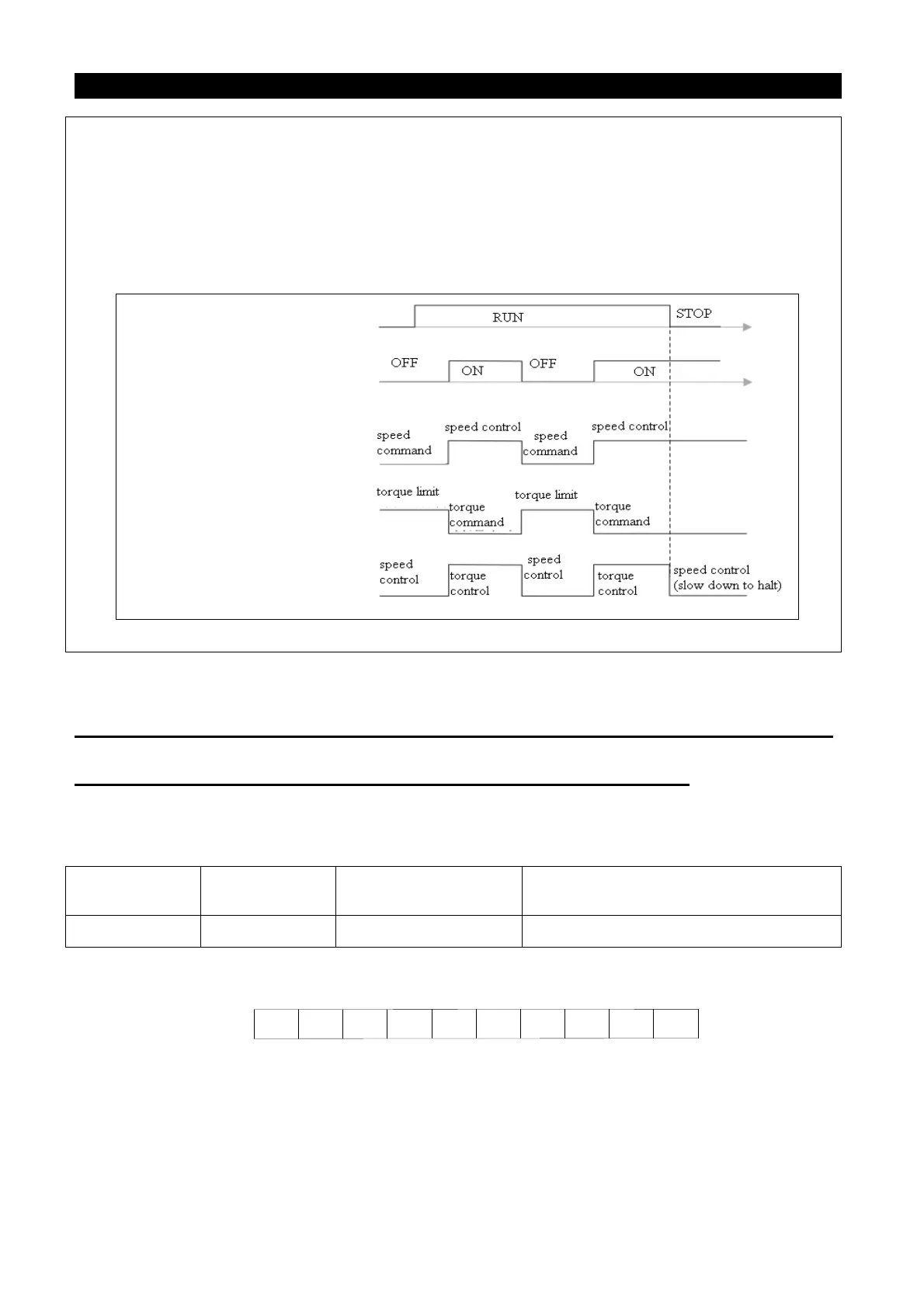
The figure as below:
operate/ stop command
P80=55 ( set M 0 as switch of
torque/ speed mode
Frequency command
Torque command
Control mode
5.40 Multi-function Terminal Input Negative/Positive Logic(P.87)
P.87 “Multi-function terminal input negative/positive logic”
● The function is bits-setting, if the bit shows 1, it means that the action of multi-function
control terminal is negative logic; otherwise, it means that the action is positive logic.
Parameter
Setting range Remarks
87 0 0~1023 ---
The definition of each bit of P.87 is as follows:
2
0
2
5
2
4
2
3
2
2
2
1
STFSTRM0M1M2RES
bit
2
6
2
7
2
8
M3Retain
2
9
MRS Retain
For example : A three-wire control type needs the function of STOP to be kept open(negative
logic). So if set P.80=31, take M0 terminal as three-wire control STOP function,
and P.83=0,P.84=1, and take STF and STR terminals as default positive/negative logic
function, the parameter of P.87 should be set as follows:

 Loading...
Loading...

