Parameter Description
5.91 PID Parameters 2 (P.641~P.644)
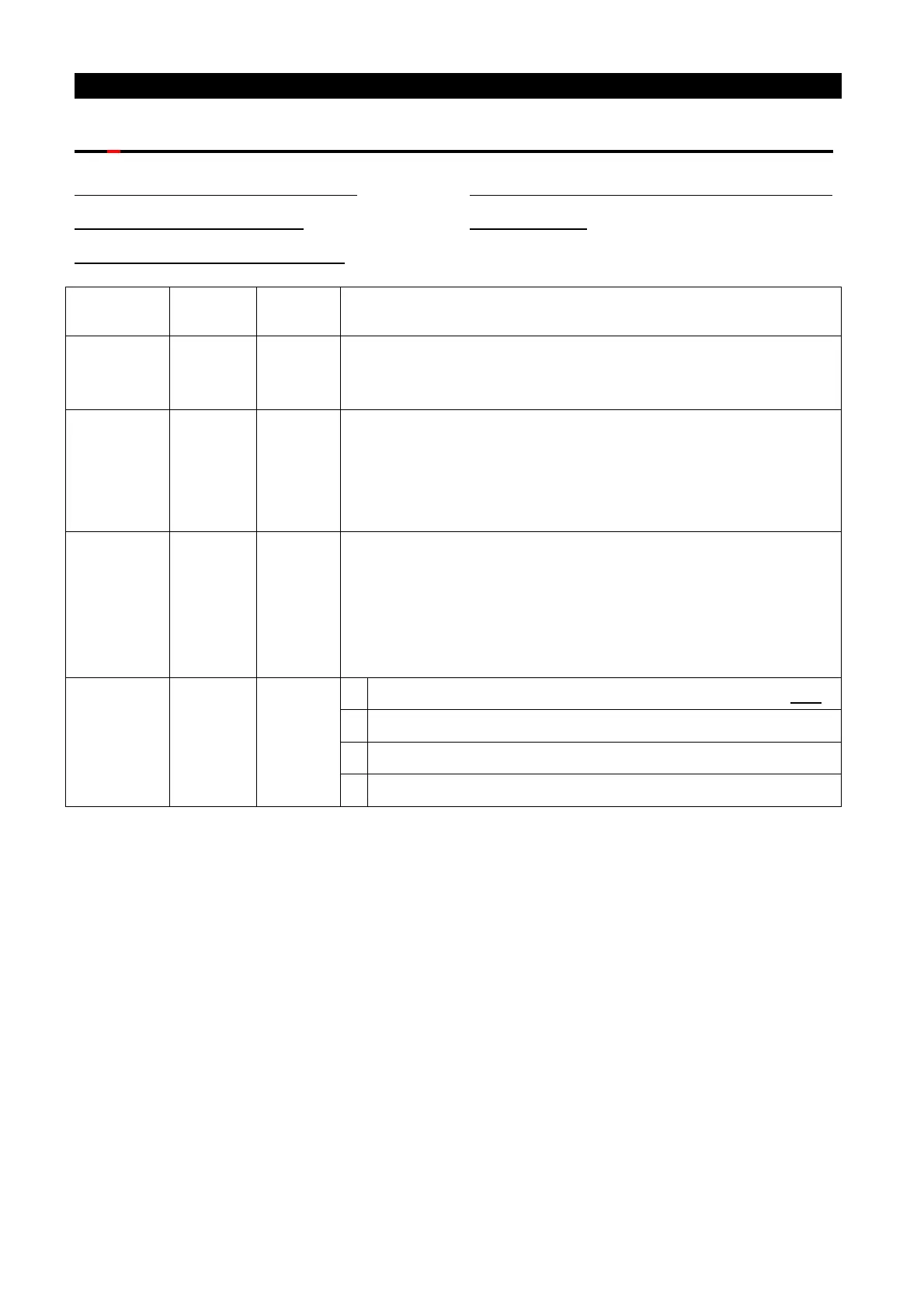
P.641 “Proportional gain P2”
P.642 “Integral time I2”
P.643 “Differential time D2”
P.644 “Auto adjustment basis for PID
parameters”
Parameter
Factory
Setting
Remarks
641 20 1~100
This gain determines the proportion controller’s impact on
feedback deviation. T
he greater the gain, the faster the
impact. Yet a gain that is too big will cause vibration.
642 1s 0~100s
This parameter is use to set integral controller’s integral
time. When the integral gain is too big, the integral effect
will be too weak to elim
inate steady deviation. When the
integral gain is too small, the system vibration frequency
will increase, and therefore the system may be unstable.
643 0
0~1000
ms
This gain determines differential controller’s impact on the
amount of change of the deviation. Appropriate differential
time can reduce the overshooting between the proportion
controller and the integral controller.
differential time is too large, sys
tem vibration may be
induced.
644 0 0~3
PID parameters 1 are active (please refer to page 128)
Adjust according to the curling radius
Adjust according to the operation frequency
Adjust according to the line speed
<Setting>
• This group of parameters is only related to the close loop speed mode.
• P.644 is the auto adjustment basis for PID parameters.
1) When P.644=0, only the first group of PID parameters is used, and the second group
is inactive.
2) When P.644=1, the adjustment is according to the curling radius. The first group of
PID parameters is used for empty roll, while the second group of PID parameters is
used for full roll. The PID parameters change continuously during the process.
3) When P.644=2, the adjustment is according to the operation frequency. This first
group of PID parameters is used upon zero speed, while the second group of
parameters is used upon maximum frequency. The PID parameters change
continuously during the process.
4) When P.644=3, the adjustment is according to the line speed. This first group of PID
parameters is used upon zero speed, while the second group of parameters is used
upon maximum line speed. The PID parameters change continuously during the

 Loading...
Loading...

