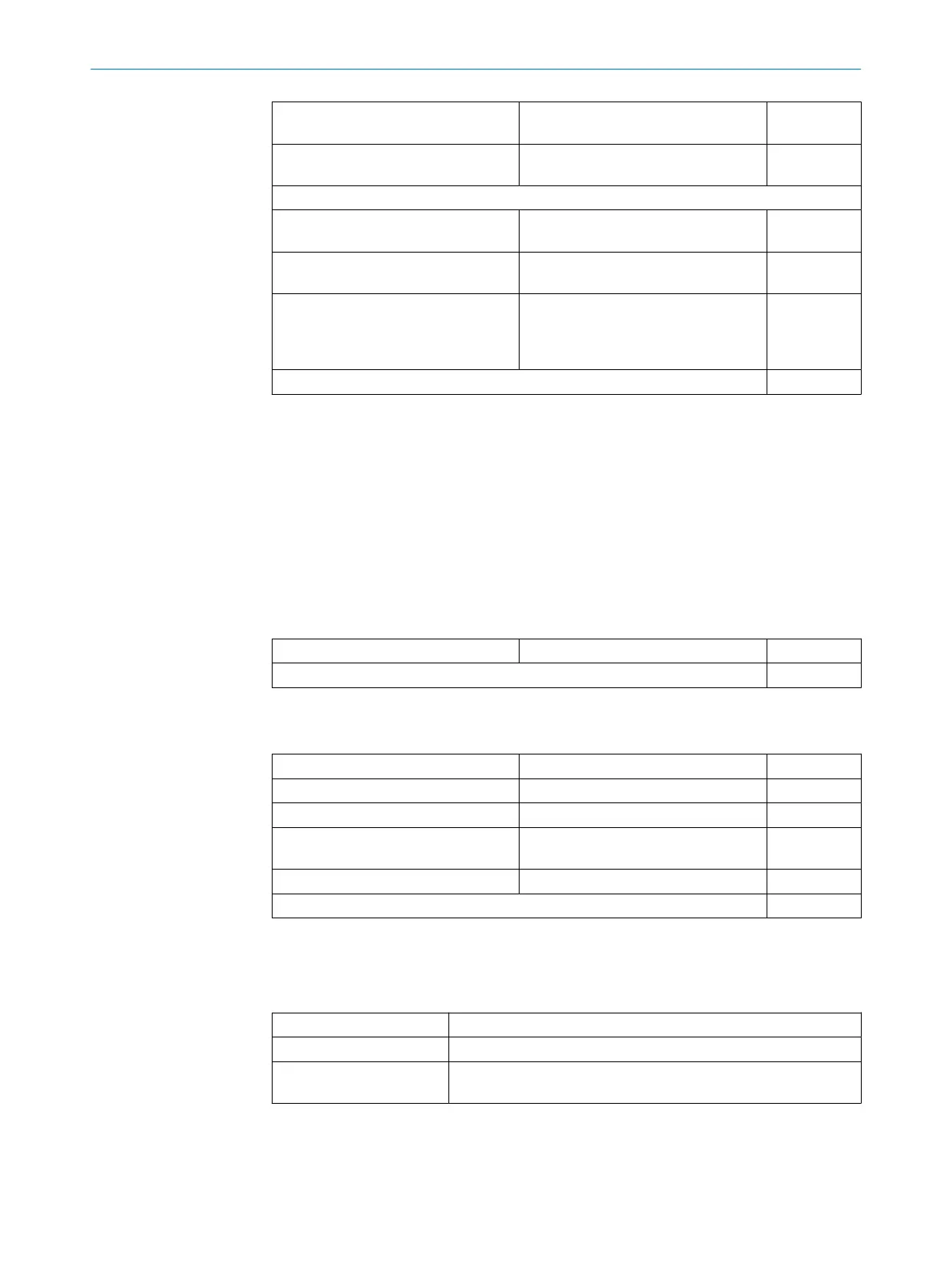
e) SSI listener (speed value and
dir
ection status)
Max. 9ms + 1.5 × max. data reception
interval
1
2
f) SSI listener (position value) Max. 9ms + max. data reception inter‐
val
2
Error detection times
a) Sine-cosine analog voltage moni‐
t
oring, vector length monitoring
22ms
b) Sine-cosine analog voltage moni‐
toring, signal deviation monitoring
6ms +1 sine-cosine period, but min.
10ms
c) Error detection time for ID
c
ode monitoring with FX3-EBX1, FX3-
EBX3, or FX3-EBX4 encoder/motor
feedback connection box
3
10ms
Total E4
1
Since the speed is calculated from the position difference between two detected position values, the
speed value is an average of the actual speed within the time interval for position detection. In the case
of an assumed linear speed change, the response time for the speed value is therefore greater than the
response time for the position value by ½ the time interval for position detection. In the case of A/B
incremental encoders and sine-cosine encoders, the time interval for position detection is 4ms; for SSI
encoders it is the selected maximum data reception interval, in a worst-case scenario.
2
This is the selected value in the dialog box for the SSI encoder. Take the value from the configuration
software report.
3
See “FlexiSoft in the FlexiSoft Designer Configuration Software” and “FlexiSoft in the Safety Designer
Configuration Software” operating instructions, “Encoder connection type and monitoring of ID identifier”
section.
Output to an FX3-MOCx (A4)
T
able 105: Calculation of the response time for the output to an FX3-MOCx (A4) in milliseconds
General information FX3-CPUx logic to FX3-MOCx logic 4ms
Total A4 4ms
Analog inputs (E5)
T
able 106: Calculation of the response time for the analog inputs (E5) in milliseconds
Generally Sensor response time
1)
Generally Processing time 20ms
Generally Measurement cycle 4ms
If more than 1 cycle with average value
f
ilter
(Number of cycles–1) × measurement
cycle
If sensor AI1 delayed + delay for sensor AI1
E5 total
1)
Take value from the corresponding operating instructions.
12.2.1.1 Example 1: Calculation of the response time for a Flexi Soft system consisting of an FX3-CPU1 and
an FX3-
XTIO
Digital inputs (E1): C4000 safety light curtain at FX3-XTIO (e.g.,a
t I5/I6)
Digital outputs (A1): Robot, dual-channel, at FX3-XTIO (e.g.,at Q3/Q4)
Input of EFI-enabled device
(E2):
C4000 receiver (stand-alone) at FX3-CPU1 (e.g.,at EFI1_A)
Two paths must be considered and calculated separately:
TECHNICAL DATA 12
8012478/1IG6/2023-02-24 | SICK O P E R A T I N G I N S T R U C T I O N S | Flexi Soft Modular Safety Controller
135
Subject to change without notice