Commissioning Manual
244 01/2017
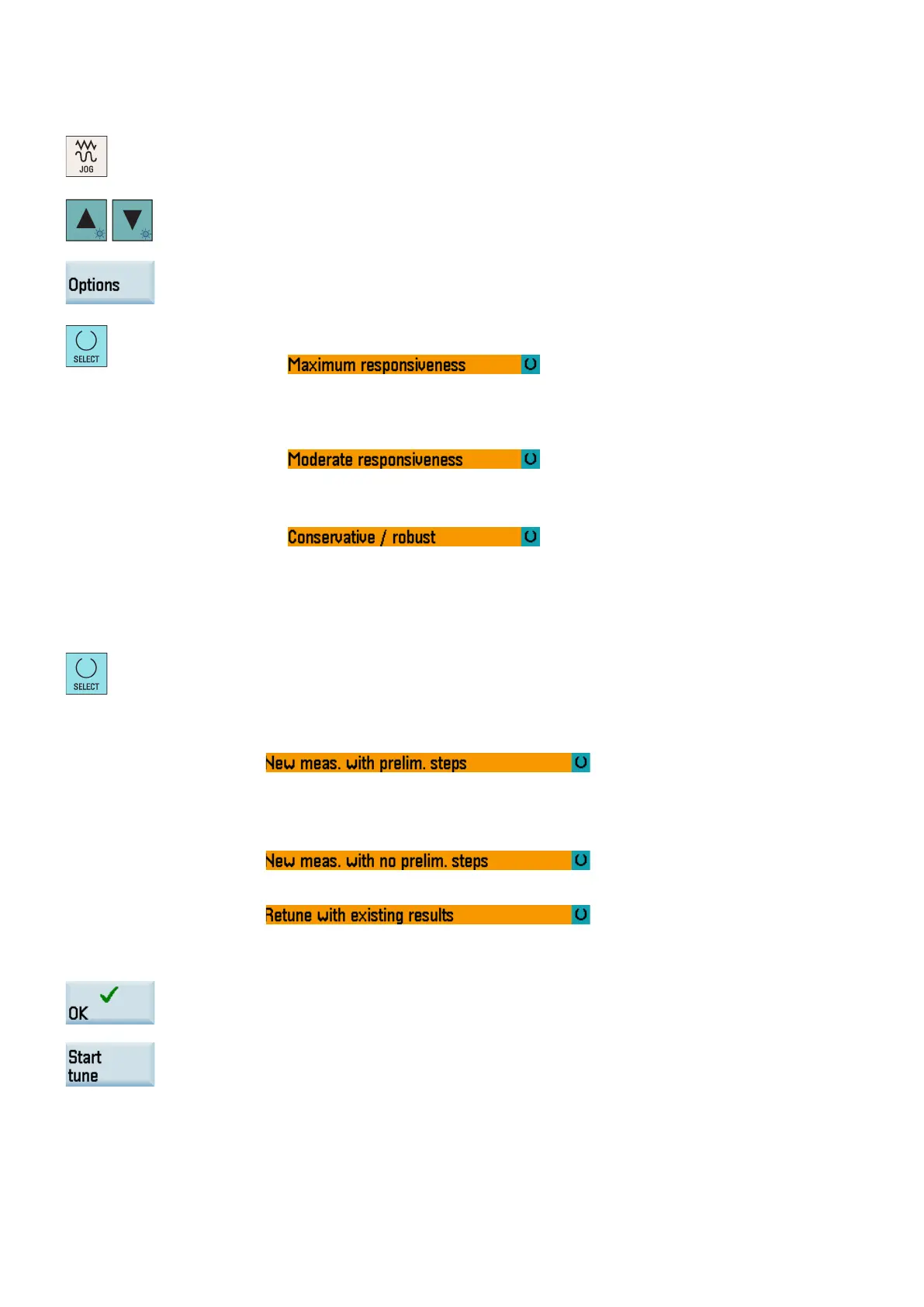
Switch to "JOG" mode. Note that the drive tuning can be performed in "JOG" mode only.
You can select all axes (including the spindle) or an individual axis/
spindle for tuning.
Press this softkey to enter
the window for selecting the tuning options.
this key to select a desired tuning objective. There are three objectives available for
(default setting)
The speed and position controller gain (servo gain factor) is tuned with maximum values
and minimum ruggedness. This setting is recommended for high-speed machining with
maximum suppression of all disturbing forces. The machine must have a rigid design;
the dynamic masses do not change significantly.
This controller dynamic response is sufficient for the majority of machines and
applications. The setting is more rugged than the default setting and is suitable for
numerous applications.
Only weak control gains are selected in order to ensure as
high a level of ruggedness as
possible. The speed controller is tuned so that it achieves maximum damping to prevent
oscillations and to achieve good position controller gain. This setting is suitable for axes
that react with oscillations, e.g. main spindles on turning machines or large axes with
high load mass.
Move the cursor and select the desired measurement and interpolation options for each
axis.
For the first tuning, only the following measurement option is available, which enables a new
measurement with all preliminary measurement steps.
The following additional measurement options are avail
able only if you have performed
drive tuning for this axis:
Performs a new measurement without carrying out the preliminary steps:
Uses the existing measurement results:
Besides, you can also specify the axis/axes for interpolation path tuning by sele
cting the
corresponding interpolation option.
Press this softkey to confirm the selections and return to the main screen of drive tuning.
Press this softkey to enter the preparation screen before the tu
ning.
 Loading...
Loading...













