Robertson AP9 Mk3 Autopilot
5-34 20169223D
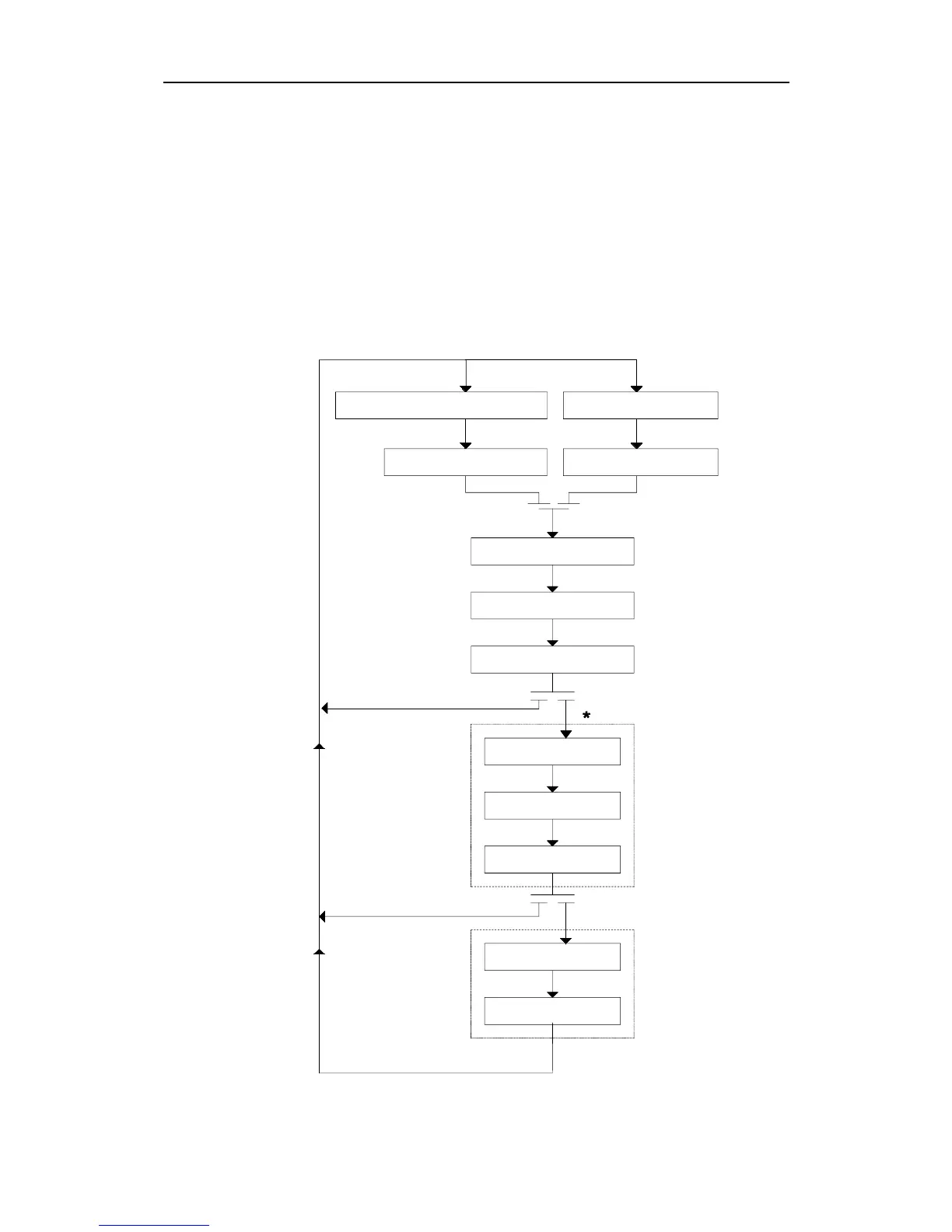
The second loop contains parameter setting, entered during
initialization. It also includes software version and runtime in
AUTO/NAV mode.
The Debug loops are also divided in two loops and are intended for
service purpose.
The first loop contains information of signal status while the second
loop, the Service loop, contains different selections for test purpose
and operating condition.
The service loop also contains a Save Ideal function. Always store
the parameters when change of tuning is made.
TURN RATE
NAV. TRIM
NAV. GAIN
NAV. FILT
COMP. DIFF
GYRO ADJ.
AUTOTRIM
RUDDER LIM
OFFCOURS. L
*
Only when NAV
mode is selected
**
**
Only when two
compasses are
used
Return to RUDDER LIM.
Return to RUDDER LIM.
Return to
RUDDER LIM.
RADIUS
RADIUS STEERINGRATE OF TURN STEERING
Fig. 5-39
Info loop 1