8.3 Setting Common Basic Functions
8-21
(3) Selecting the Motor Stop Method When Overtravel is Used
This is used to set the stop method when an overtravel (P-OT, N-OT) signal is input while the motor is operating.
* For details on stopping methods when the servo turns OFF or when an alarm occurs, refer to 8.3.5 Selecting the Stopping
Method After Servo OFF.
(4) Setting the Stop Torque for Overtravel
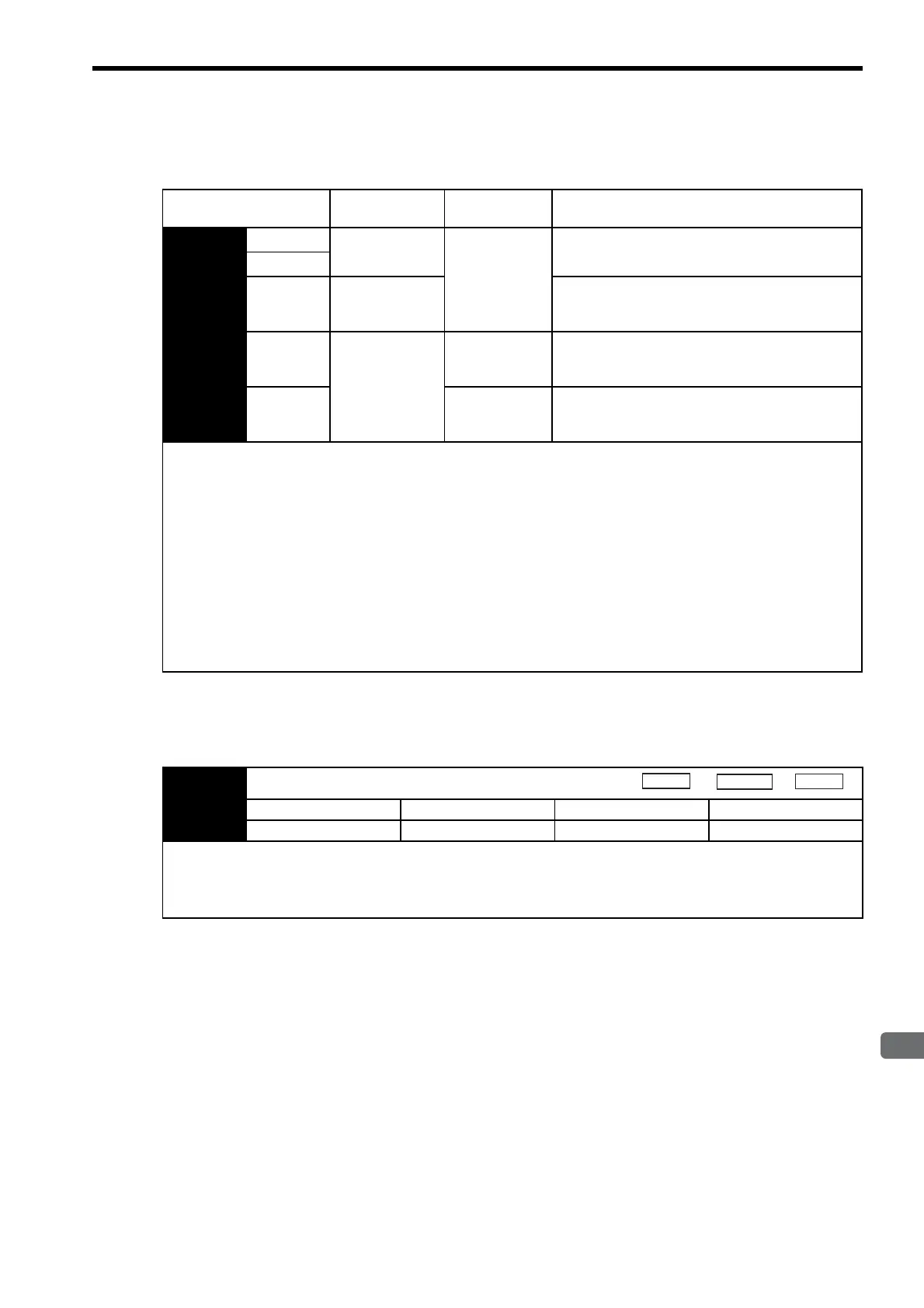
Parameter Stop Mode Mode After
Stopping
Meaning
Pn001
n.
00
Stop by dynamic
brake
Coast Rapidly stops the servomotor by dynamic braking
(DB), then places it into Coast (power OFF) Mode.
n.
01
n.
02
Coast to a stop Stops the servomotor in the same way as when the
servo is OFF (coasts to a stop), then places it into
Coast (power OFF) Mode.
n.
1
Decelerate to stop Zero Clamp Decelerates the servomotor with emergency stop
torque (Pn406), then places it into Zero Clamp (Ser-
volock) Mode.
n.
2
Coast Decelerates the servomotor with emergency stop
torque (Pn406), then places it into Coast (power
OFF) Mode.
• During torque control, the Pn001.1 setting (the stopping method by Pn001.0) is not effective. The servomotor stops by
dynamic breaking (DB) or coasts to a stop.
• After it is stopped, the servomotor enters Coast Mode.
• After changing these parameters, turn OFF the main circuit and control power supplies and then turn them ON again to
enable the new settings.
• Even during Coast Mode, the servomotor can be rotated in the opposite direction in which overtravel occurred.
TERMS
• Stop by dynamic brake: Stops by using the dynamic brake (with short-circuiting by a circuit of SERVOPACK).
• Coast to a stop: Stops naturally, with no brake, by using the friction resistance of the motor in operation.
• Decelerate to stop: Stops by using deceleration (braking) torque.
• Zero Clamp Mode: A mode forms a position loop by using the position reference zero.
Pn406 Emergency Stop Torque
Setting Range Setting Unit Factory Setting Setting Validation
0 to 800 1% 800 Immediately
• This sets the stop torque for when the overtravel signal (P-OT, N-OT) is input.
• The setting unit is a percentage of the rated torque (i.e., the rated torque is 100%).
• The value large enough to be the motor maximum torque, 800% is set as the factory setting for emergency stop torque.
However, the actual output emergency stop torque is determined by motor ratings.
 Loading...
Loading...







