2.3 Specifications
2
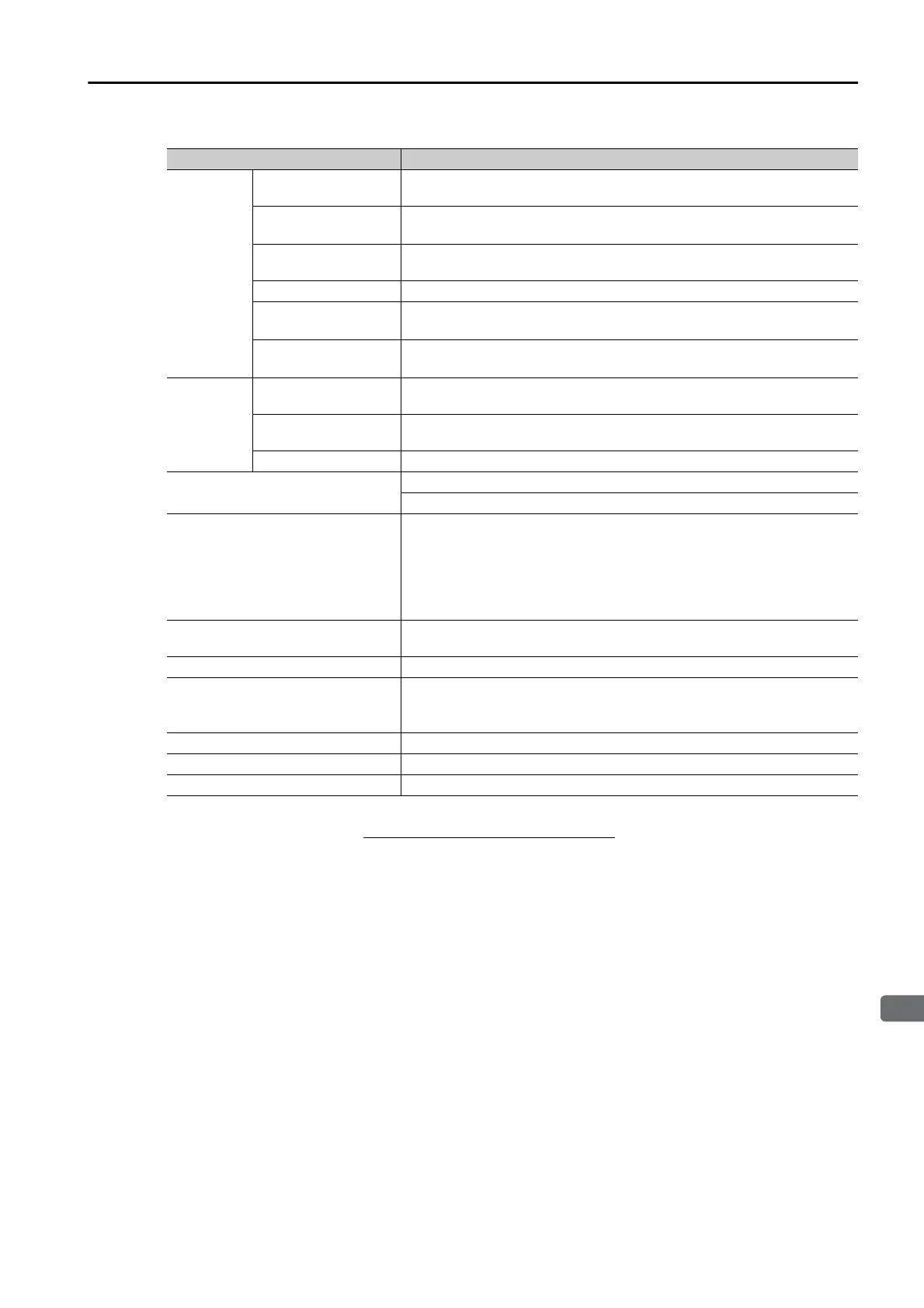
SERVOPACK Ratings and Specications
2-7
* The coefficient of speed fluctuation for load fluctuation is defined as follows:
MECHA-
TROLINK-III
Communi-
cations
Communications Pro-
tocol
MECHATROLINK-III
Station Address
Settings
03h to EFh (maximum number of slaves: 62)
The rotary switches (S1 and S2) are used to set the station address.
Extended Address
Setting
Axis A: 00h, Axis B: 01h
Transmission Speed 100 Mbps
Transmission Cycle
250 μs, 500 μs, 750 μs,
1.0 ms to 4.0 ms (multiples of 0.5 ms)
Number of Transmis-
sion Bytes
32 or 48 bytes/station
A DIP switch (S3) is used to select the transmission speed.
Reference
Method
Performance
Position, speed, or torque control with MECHATROLINK-III communi-
cations
Reference Input
MECHATROLINK-III commands (sequence, motion, data setting, data
access, monitoring, adjustment, etc.)
Profile
MECHATROLINK-III standard servo profile
MECHATROLINK-III Communica-
tions Setting Switches
Rotary switch (S1 and S2) positions: 16
Number of DIP switch (S3) pins: 4
Analog Monitor (CN5)
Number of points: 2
Output voltage range: ±10 VDC (effective linearity range: ±8 V)
Resolution: 16 bits
Accuracy: ±20 mV (Typ)
Maximum output current: ±10 mA
Settling time (±1%): 1.2 ms (Typ)
Dynamic Brake (DB)
Activated when a servo alarm or overtravel (OT) occurs, or when the
power supply to the main circuit or servo is OFF.
Regenerative Processing Built-in
Overtravel (OT) Prevention
Stopping with dynamic brake, deceleration to a stop, or coasting to a
stop for the P-OT (Forward Drive Prohibit) or N-OT (Reverse Drive Pro-
hibit) signal
Protective Functions Overcurrent, overvoltage, low voltage, overload, regeneration error, etc.
Utility Functions Gain adjustment, alarm history, jogging, origin search, etc.
Applicable Option Modules None
Continued from previous page.
Item Specification
× 100%
Coefcient of speed uctuation =
No-load motor speed - Total-load motor speed
Rated motor speed

 Loading...
Loading...







