3.4 Position Correction Table Settings
3.4.4 Setting Method with the MEM_WR Command
3-22
Initializing the Position Correction Table
Example of Initializing the Position Correction Table
Initialize the setting values in non-volatile memory to the default setting values of the settings
table. Refer to the following section for details on the settings table.
3.4.2 Position Correction Table Details on page 3-7
Send the commands in the following order.
This concludes the procedure to initialize the Position Correction Table data.
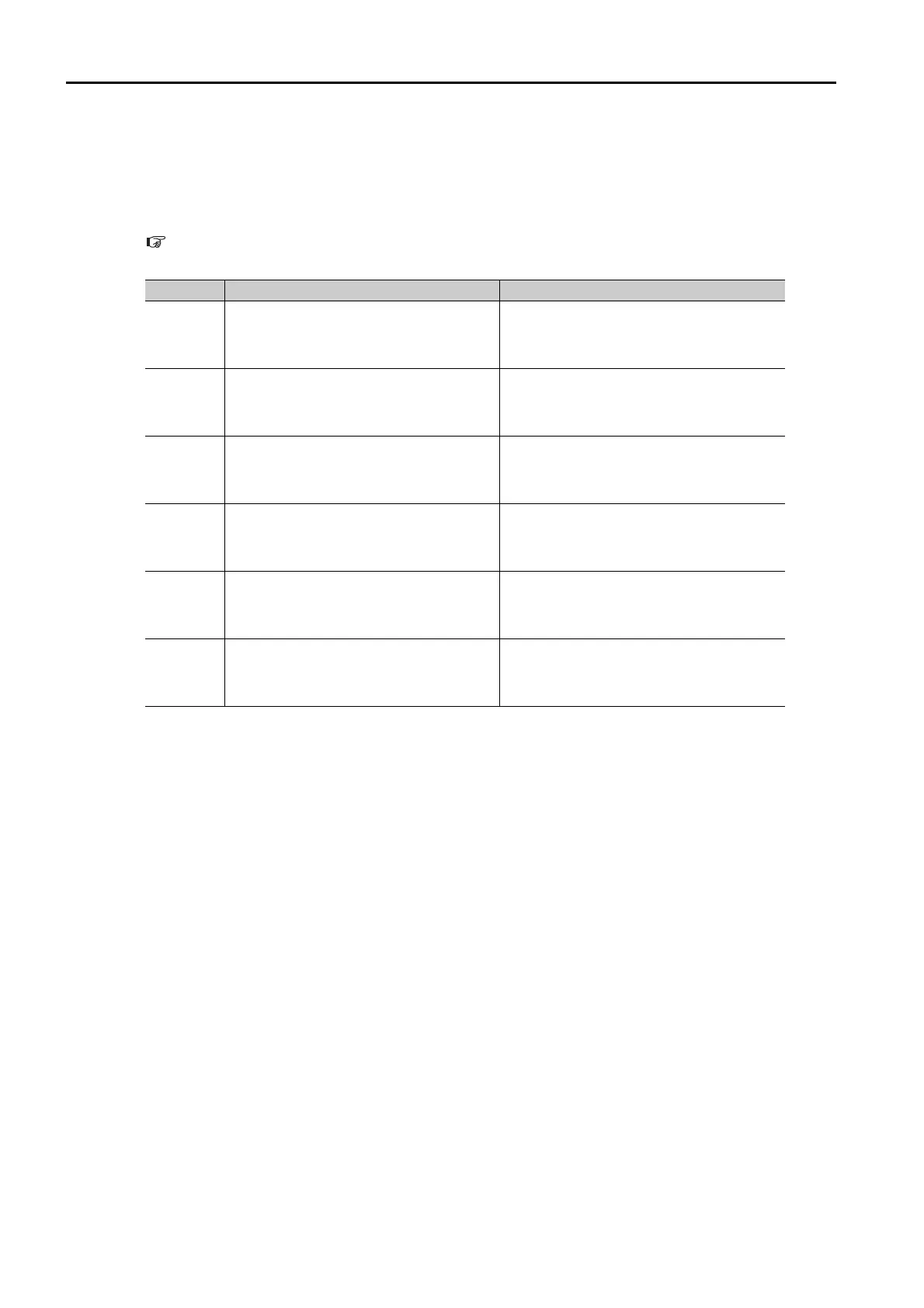
Step Description Setting Example
1
Sets the request code for initializing
non-volatile memory.
ADDRESS = 0x80004000
MODE/DATA_TYPE = 0x12
SIZE = 0x0001
DATA = 0x2025
2
Executes preparation processing 1 for
initializing non-volatile memory.
ADDRESS = 0x800041E0
MODE/DATA_TYPE = 0x12
SIZE = 0x0001
DATA = 0x0003
3
Executes preparation processing 2 for
initializing non-volatile memory.
ADDRESS = 0x800041E4
MODE/DATA_TYPE = 0x13
SIZE = 0x0001
DATA = 0xF0040000
4
Executes preparation processing 3 for
initializing non-volatile memory.
ADDRESS = 0x80004002
MODE/DATA_TYPE = 0x12
SIZE = 0x0001
DATA = 0x0002
5
Executes initialization of non-volatile
memory.
ADDRESS = 0x80004002
MODE/DATA_TYPE = 0x12
SIZE = 0x0001
DATA = 0x0001
6
Terminates initialization of non-volatile
memory.
ADDRESS = 0x80004000
MODE/DATA_TYPE = 0x12
SIZE = 0x0001
DATA = 0x0000

 Loading...
Loading...







