AS64 series AC servo drive Function codes
-143-
This parameter specifies the position arrival range. If the deviation between the position
feedback pulse and position command pulse is in this range, the position is arrived at.
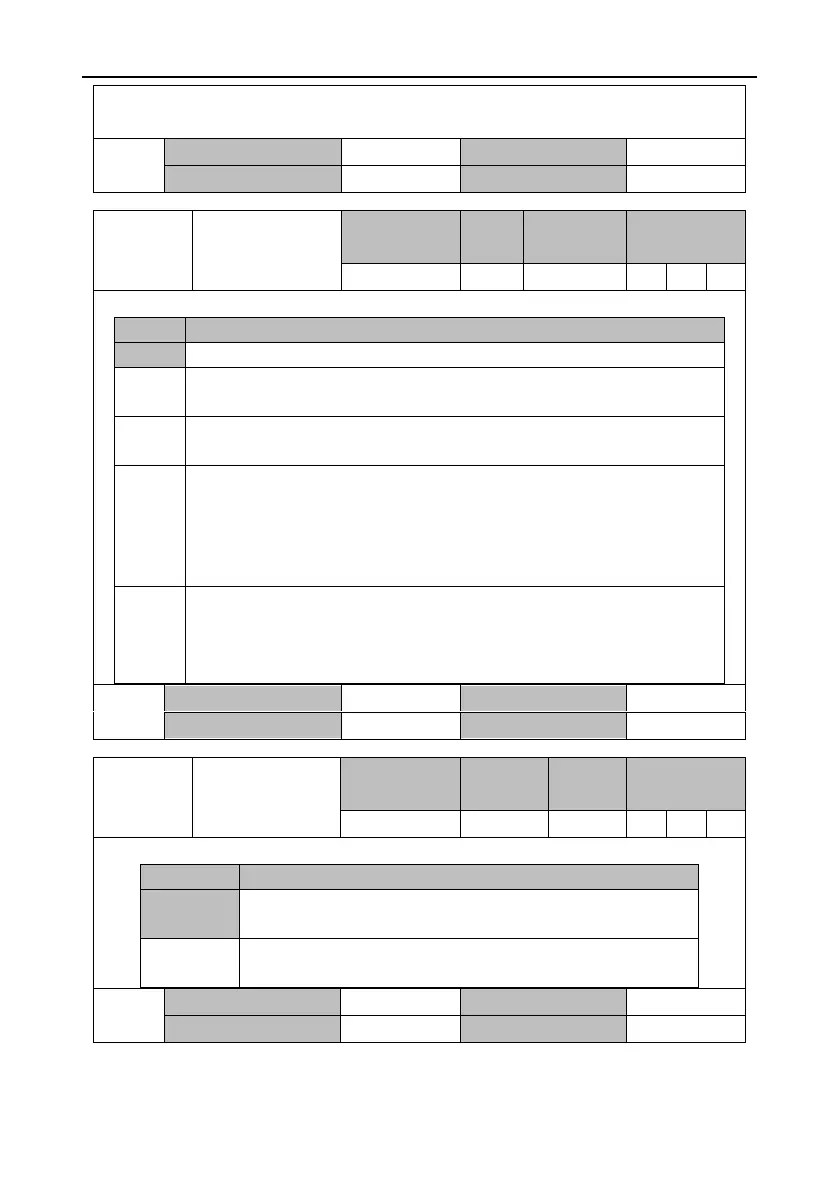
Output mode of
position arrival
This parameter specifies the output condition and subsequent action of position arrival.
The output is valid when the position deviation is in the range of P3.50.
The output is valid when there is no position command and the position deviation
is in the range of P3.50.
The output is valid when there is no position command, the zero-speed detection
signal is valid, and the position deviation is in the range of P3.50.
The output is valid when there is a transition from with a position command to
without a position command and the position deviation is in the range of P3.50.
Subsequently, the system continuously outputs the valid state within the time
specified by P3.52. Then, the system updates the output status of position arrival
based on the position command and position deviation.
The output is valid when there is a transition from with a position command to
without a position command and the position deviation is in the range of P3.50.
Subsequently, the system continuously outputs the valid state within the time
specified by P3.52.
Hold time of position
arrival output
terminal
This parameter specifies the hold time of the position arrival output terminal.
The hold time is infinite, and the holding is valid until the position in
a next position command is arrived at.
The holding is valid within the setting range. It becomes invalid
once a next position command is received.