AS64 series AC servo drive Function codes
-151-
This parameter specifies whether to enable control mode switching of the drive when the hybrid
control mode is used. The switching control is valid in the enabling state.
Note: If the control mode switching command is updated, the actual switching process of the
drive and motor is handled based on the settings of P0.90–P.92 and actual feedback state.
This parameter specifies whether to enable gain switching for the drive. When P2.22, P2.27, and
P2.31 are set to 2, the actual gain settings are used for switching.
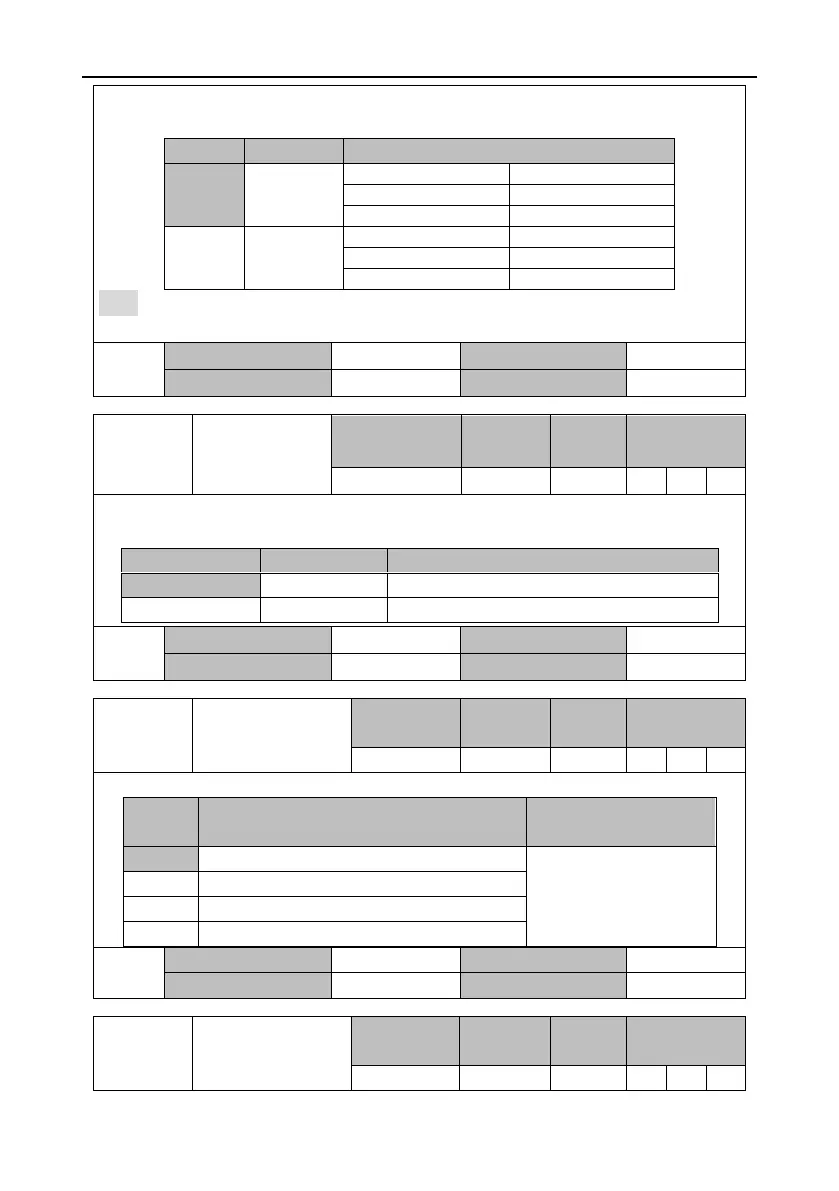
Electronic gear ratio
switching command
This parameter is used to switch electronic gear ratios for the drive when P4.10 is set to 1.
Numerator of actual electronic gear ratio
Denominator of actual
electronic gear ratio
Numerator of electronic gear ratio 1 (P0.25)
Denominator of
electronic gear ratio
(P0.26)
Numerator of electronic gear ratio 2 (P0.27)
Numerator of electronic gear ratio 3 (P0.28)
Numerator of electronic gear ratio 4 (P0.29)
Inertia ratio switching
command