38 • CamExpert Quick Start Xtium-CL MX4 User's Manual
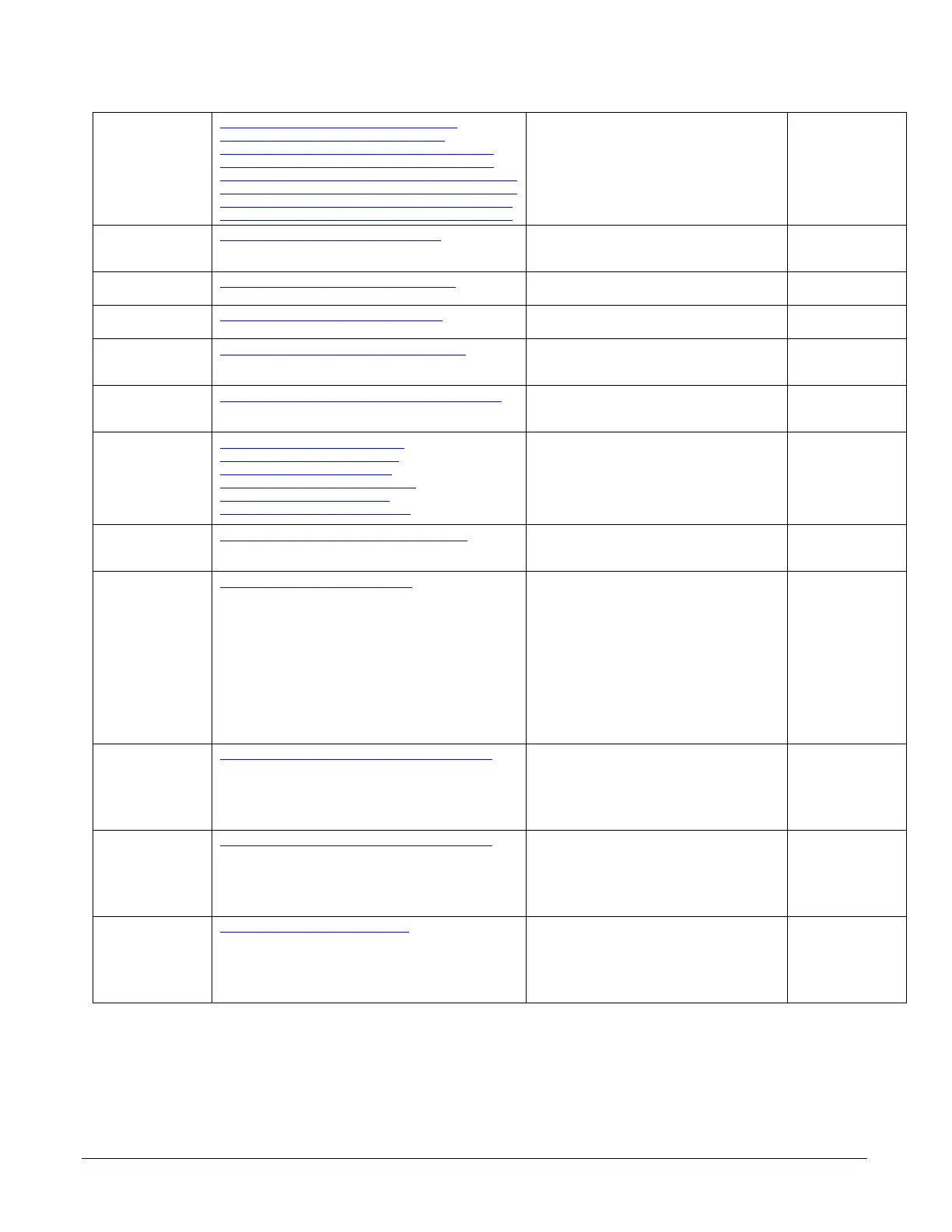
Time Integration
Method Setting
CORACQ_PRM_TIME_INTEGRATE_METHOD
CORACQ_PRM_TIME_INTEGRATE_DELAY
CORACQ_PRM_TIME_INTEGRATE_PULSE0_DELAY
CORACQ_PRM_TIME_INTEGRATE_PULSE1_DELAY
CORACQ_PRM_TIME_INTEGRATE_PULSE0_DURATION
CORACQ_PRM_TIME_INTEGRATE_PULSE1_DURATION
CORACQ_PRM_TIME_INTEGRATE_PULSE0_POLARITY
CORACQ_PRM_TIME_INTEGRATE_PULSE1_POLARITY
When the Camera Control method is Time
Integration, select and configure the control
method required.
Click on the parameter field to open the
configuration dialog.
Camera Trigger
Method Setting
CORACQ_PRM_CAM_TRIGGER_METHOD When an asynchronous trigger pulse to a
camera is required, select and configure the
required method.
Line Integration
Method Setting
CORACQ_PRM_LINE_INTEGRATE_METHOD
Sets the method for controlling the
camera’s line integration.
Applies to linescan
cameras only
Line Trigger
Method Setting
CORACQ_PRM_LINE_TRIGGER_METHOD
Sets the method for line trigger pulse
output.
Applies to linescan
cameras only
Camera Frames
Per Trigger
CORACQ_PRM_CAM_FRAMES_PER_TRIGGER Specifies the number of frames output by
the camera per trigger. Valid only for area
scan cameras. Valid range is 1-262142.
Camera Control
During Readout
CORACQ_PRM_CAM_CONTROL_DURING_READOUT Specifies if the camera control signals can
be sent during the readout of a frame.
Possible values are Valid or Invalid.
Strobe Method
Setting
CORACQ_PRM_STROBE_METHOD
CORACQ_PRM_STROBE_ENABLE
CORACQ_PRM_STROBE_DELAY
CORACQ_PRM_STROBE_DURATION
CORACQ_PRM_STROBE_LEVEL
CORACQ_PRM_STROBE_POLARITY
When a strobe output signal from the
acquisition board is required, select and
configure the control method required.
Note, method 1 is only available for
areascan camera type; method 3 for line
scan only.
Line Trigger Auto
Delay
CORACQ_PRM_LINE_TRIGGER_AUTO_DELAY
Enables delaying line triggers to a camera
based on the selected method. Used to
avoid over-triggering a camera.
Applies to linescan
cameras only
Time Stamp Base CORACQ_PRM_TIME_STAMP_BASE
Sets the counter stamp time base. Possible
values are:
Microseconds
(CORACQ_VAL_TIME_BASE_US)
Line Counts
CORACQ_VAL_TIME_BASE_LINE_VALID
External line trigger or shaft encoder
CORACQ_VAL_TIME_BASE_LINE_TRIGGER
CORACQ_VAL_TIME_BASE_SHAFT_ENCODE
R
100 Nanoseconds
CORACQ_VAL_TIME_BASE_100NS (0x200)
Board Sync
Output 1 Source
CORACQ_PRM_BOARD_SYNC_OUTPUT1_SOURCE Specifies the signal to output on board sync
output 1. This parameter permits the
synchronization of two acquisition devices
using a signal from one acquisition device
and synching the second acquisition device
with it.
Board Sync
Output 2 Source
CORACQ_PRM_BOARD_SYNC_OUTPUT2_SOURCE Specifies the signal to output on board sync
output 2. This parameter permits the
synchronization of two acquisition devices
using a signal from one acquisition device
and synching the second acquisition device
with it.
CC1
to
CC4
CORACQ_PRM_CAM_IO_CONTROL General purpose camera control. Four LVDS
pairs are reserved for general purpose
camera control. They are defined as camera
inputs and frame grabber outpus. Camera
manufacturers can define these signals to
meet their needs for a particular product.