Xtium-CL MX4 User's Manual CamExpert Quick Start • 35
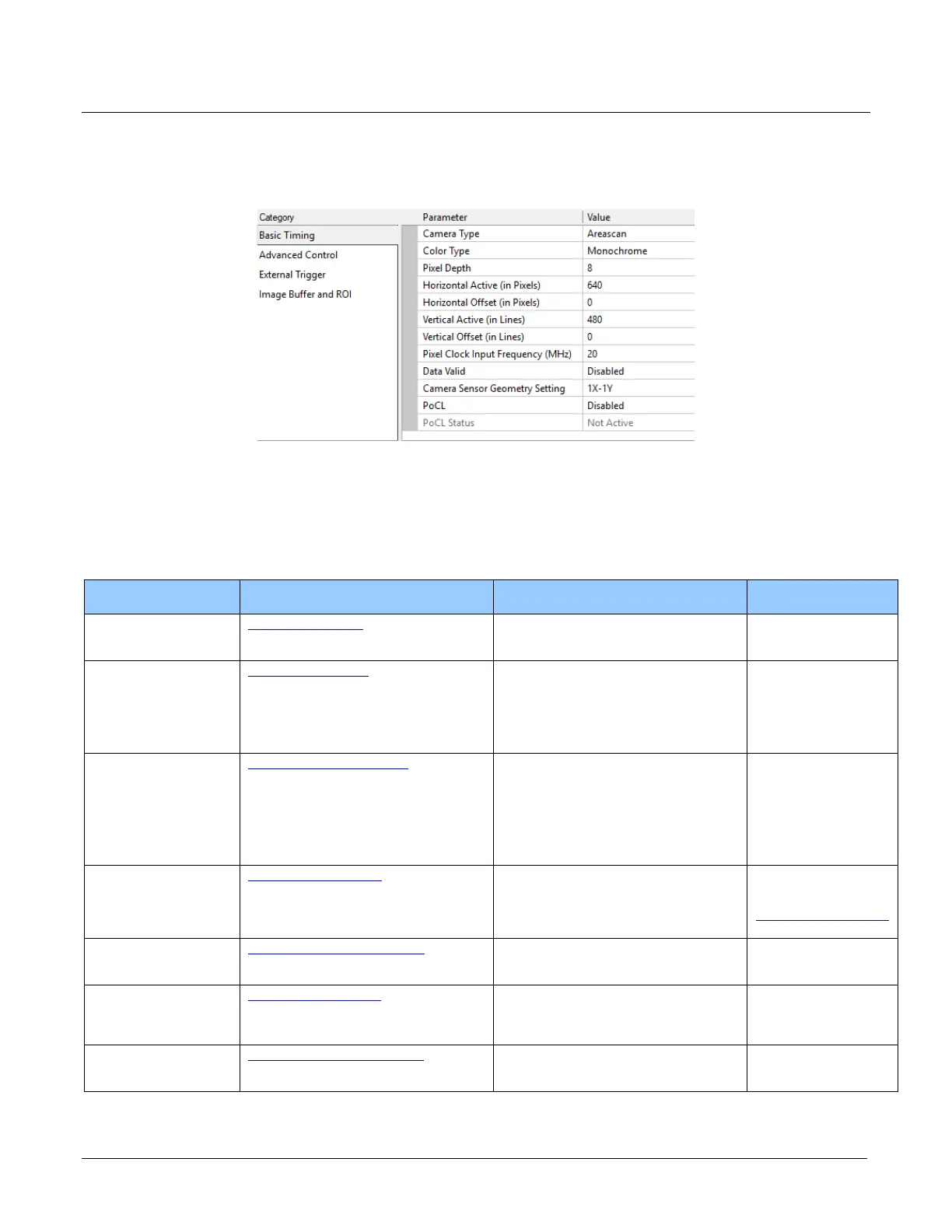
Basic Timing Category
The Basic Timing category groups parameters such as camera type, the active image size, and
other settings related to basic timing.
Parameter Descriptions
The following table describes the CamExpert Basic Timing category of Sapera LT parameters.
Acquisition server notes, if applicable, indicate if parameter availablility or supported values are
dependent on the selected frame grabber acquisition server and acquisition device.
Display Name Parameter Description Notes
Camera Type CORACQ_PRM_SCAN Video source image type. Possible values
are areascan or line scan.
Not shown for Bayer
servers (areascan
only).
Color Type CORACQ_PRM_VIDEO Sets the color format of the input source. Not shown for RGB or
Bayer servers.
Monochrome servers
support:
Monochrome
Bayer mosaic
Pixel Depth CORACQ_PRM_PIXEL_DEPTH
Pixel depth (bits per pixel) of the input
source.
Not shown for RGB
servers.
Monchrome servers
support:
8, 10, 12, 14 or 16 bit
Bayer servers support:
8, 10 or 12 bit
Horizontal Active (in
Pixels)
CORACQ_PRM_HACTIVE
Sets the horizontal camera resolution in
pixels. This corresponds to the visible part
of the image from the camera.
For application server
specifc support, refer to
the parameter
CORACQ_PRM_HACTIVE
description.
Horizontal Offst (in
Pixels)
CORACQ_PRM_HBACK_INVALID
Sets the number of invalid pixels before
the active portion of the line, in pixels per
tap. Valid range is 0-65535.
Vertical Active (in Lines) CORACQ_PRM_VACTIVE Sets the vertical camera resolution in lines
per frame. This corresponds to the visible
part of the image from the camera. Valid
range is 1-16777215.
Not shown for linescan
cameras.
Vertical Offset (in Lines) CORACQ_PRM_VBACK_INVALID Sets the number of invalid lines before the
active portion of the line. Valid range is 0-
16777215.
Not shown for linescan
cameras.