5. Parameter
5−41
Festo P.BE−CPX−CMAX−CONTROL−EN en 0908NH
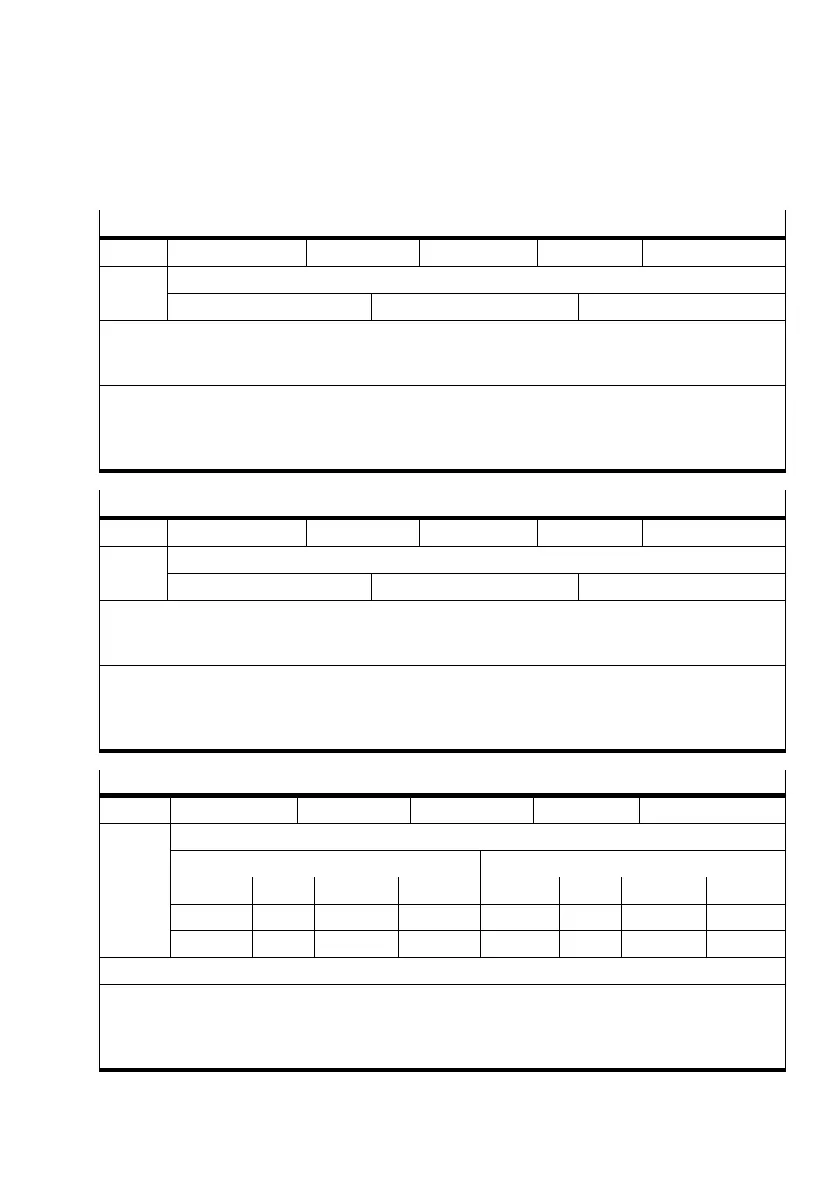
Cumulated stroke length
PNU PNU: 305 Index: 3 Max index: 4 Class: Struct Data type: int32
Values Unit: Always in metres, irrespective of the system of measurement
Default: 0 Minimum: 0 Maximum: 2.147.483.647
Total of movement changes of the drive since new state, the last data reset or a firmware download.
Records all the movements performed by the drive, irrespective of control mode or enable.
Warning: Specified in metres, not in the user system of measurement.
ý The parameter value cannot be changed.
o Writing permissible only in commissioning/parametrising mode with disabled controller.
o This parameter can be written by FCT without higher−order controller.
o After writing, controller recalculation is carried out.
Cumulated stroke length fraction
PNU PNU: 305 Index: 4 Max index: 4 Class: Struct Data type: int32
Values Unit: Always in micrometres, irrespective of the system of measurement
Default: 0 Minimum: 0 Maximum: 1.000.000
Total of movement changes of the drive since the last full meter was reached (PNU305:3).
Records all the movements performed by the drive, irrespective of control mode or enable.
Warning: Specified in micrometres, not in the user system of measurement.
ý The parameter value cannot be changed.
o Writing permissible only in commissioning/parametrising mode with disabled controller.
o This parameter can be written by FCT without higher−order controller.
o After writing, controller recalculation is carried out.
Current speed
PNU PNU: 307 Index: 1 Max index: 1 Class: Var Data type: int32
Values Unit: Speed (index = 6)
Linear drive Semi−rotary drive
Dimension Default Minimum Maximum Dimension Default Minimum Maximum
SI 0,001 m/s − −10.000.000 10.000.000 1 °/s − −10.000.000 10.000.000
Imperial 0.01 ft/s − −3.280.840 3.280.840 1 °/s − −10.000.000 10.000.000
Calculated actual speed.
ý The parameter value cannot be changed.
o Writing permissible only in commissioning/parametrising mode with disabled controller.
o This parameter can be written by FCT without higher−order controller.
o After writing, controller recalculation is carried out.

 Loading...
Loading...











