5. Parameter
5−78
Festo P.BE−CPX−CMAX−CONTROL−EN en 0908NH
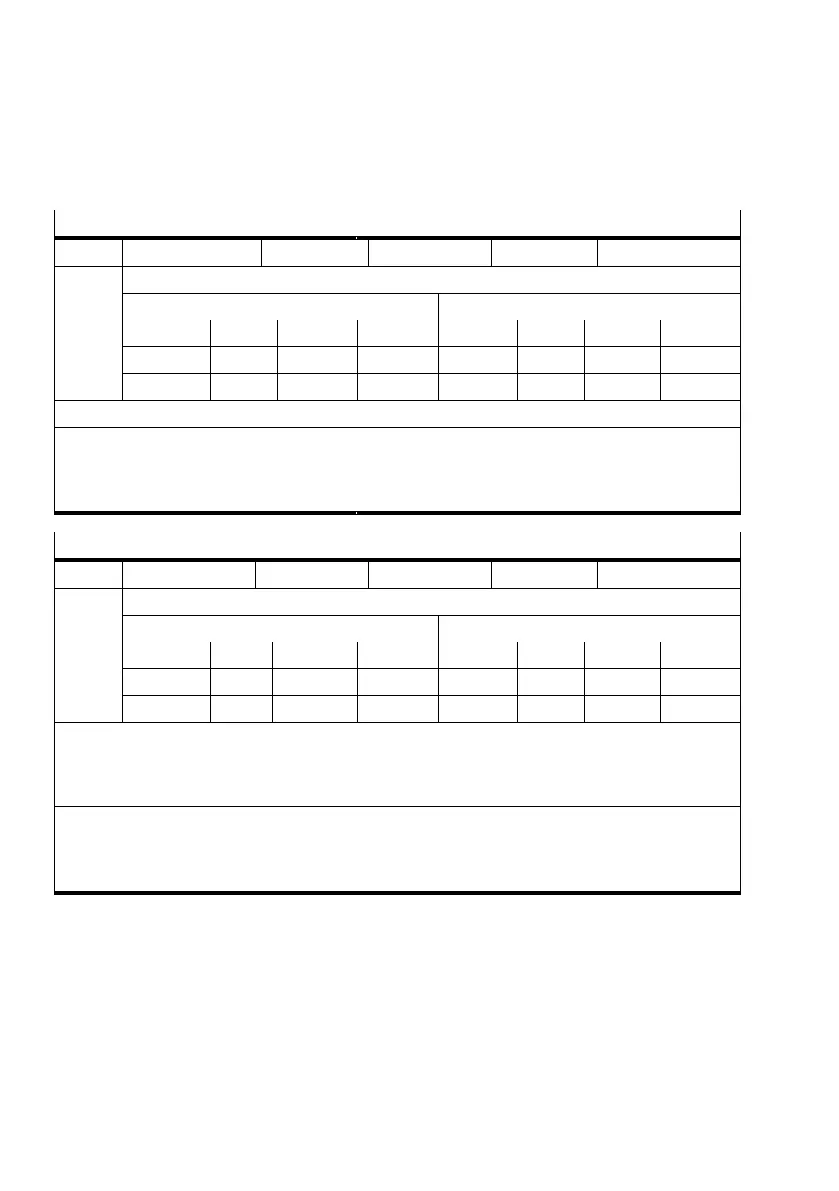
Homing speed
PNU PNU: 1132 Index: 1 Max index: 1 Class: Var Data type: int32
Values Unit: Speed (index = 6)
Linear drive Semi−rotary drive
Dimension Default Minimum Maximum Dimension Default Minimum Maximum
SI 0,001 m/s 50 10 200 1 °/s 50 10 200
Imperial 0.01 ft/s 15 3 66 1 °/s 50 10 200
Speed at which the drive searches for the stop during homing.
o The parameter value cannot be changed.
ý Writing permissible only in commissioning/parametrising mode with disabled controller.
o This parameter can be written by FCT without higher−order controller.
o After writing, controller recalculation is carried out.
Mounting angle
PNU PNU: 1140 Index: 1 Max index: 1 Class: Var Data type: int32
Values Unit: Mounting angle (index = 12)
Linear drive Semi−rotary drive
Dimension Default Minimum Maximum Dimension Default Minimum Maximum
SI 0,1 ° 0 −900 900 0,1 ° 0 −900 900
Imperial 0,1 ° 0 −900 900 0,1 ° 0 −900 900
Mounting angle for the drive
A specification of −90° to −0.1° means that the sensor zero point is at the top and the drive moves
downward towards larger positions. With values from 0.1 to 90° the sensor zero point is at the bot
tom and the drive moves to the top.
o The parameter value cannot be changed.
ý Writing permissible only in commissioning/parametrising mode with disabled controller.
o This parameter can be written by FCT without higher−order controller.
ý After writing, controller recalculation is carried out.

 Loading...
Loading...











