10.4 Selecting a Motor Drive Control
10-21
Chapter 10 SELECTING OPTIMAL MOTOR AND INVERTER CAPACITIES
The FRENIC-MEGA features the dynamic torque vector controller with the flux estimator, which is always
correcting the magnetic flux phase while monitoring the inverter output current as the feedback. This
feature allows the inverter to always apply the drive power with an optimal voltage and current and
consequently respond to quick load variation or speed change. The feature also estimates the generated
torque of the motor from the estimated flux data and output current to the motor to improve the motor
efficiency for matching the current operation situation. This control mode is effective for applications that
need large torque in low speed range or that have quick load fluctuations. Selecting the dynamic torque
vector control automatically enables the auto-torque boost and slip compensation.
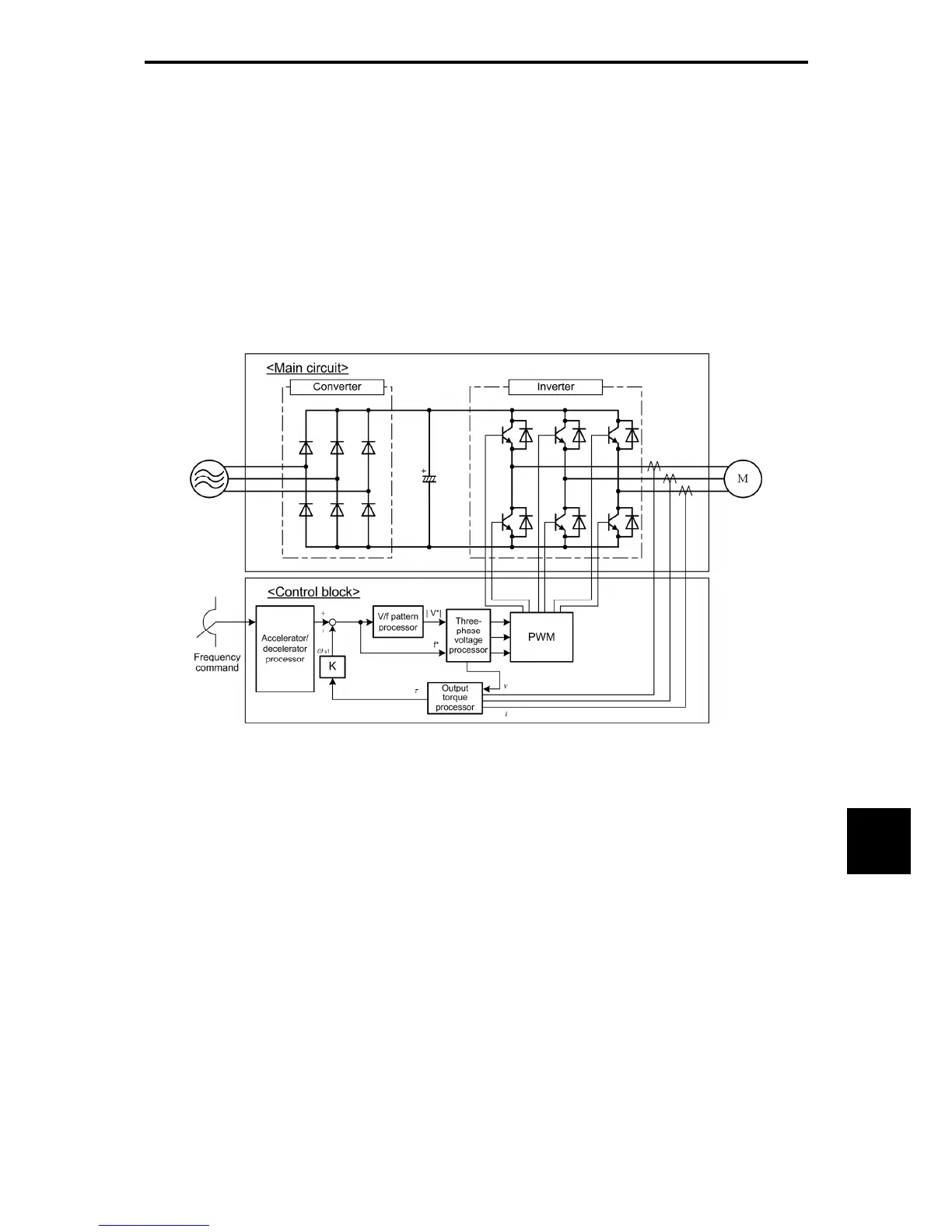
V/f control with slip compensation active
Figure 10.4-3 Schematic Block Diagram of V/f Control with Slip Compensation Active
Applying any load to an induction motor causes a rotational slip due to the motor characteristics,
decreasing the motor rotation. The inverter's slip compensation function first presumes the slip value of the
motor based on the motor torque generated and raises the output frequency to compensate for the
decrease in motor rotation. This prevents the motor from decreasing the rotation due to the slip. That is,
this function is effective for improving the motor speed control accuracy.

 Loading...
Loading...








