Shenzhen Hpmont Technology Co., Ltd. Chapter 6 Function Introduction
HD5L-PLUS Series User Manual V1.0 59
6.2.9 F08: Motor Vector Control Speed-loop Parameters
Ref. Code
Function Description Setting Range [Default]
F08.03 High speed ASR KI 0 - 9999 [500]
ASR PI switching frequency 1
ASR PI switching frequency 2
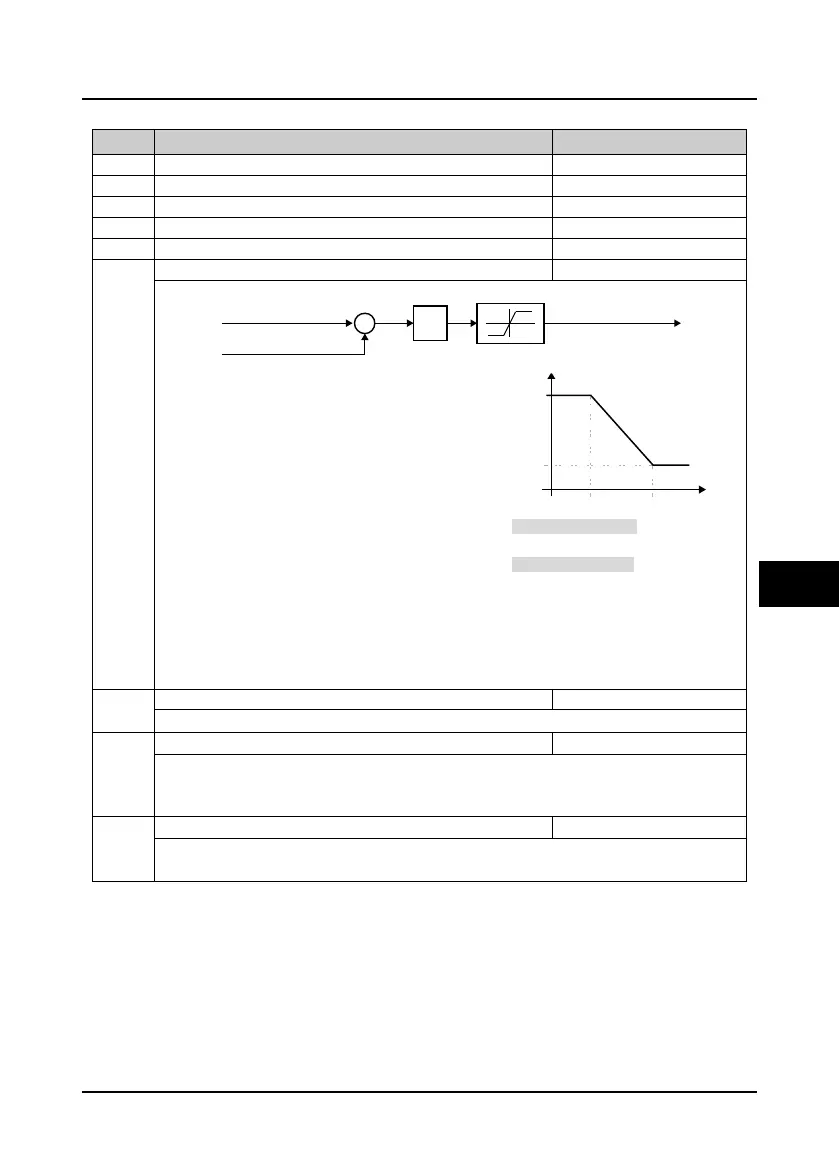
F08.00 - F08.05 and F08.07 confirm the PID parameters of ASR. The structure of ASR is shown in figure.
• When the running frequency is 0 - F08.04, the vector
control PI parameters are F08.00 and F08.01;
• When the running frequency > F08.05, the vector control
PI parameters are F08.02 and F08.03;
• When the running frequency is F08.04-F08.05, the vector
control P parameter is the linear interpolation between
F08.00 and F08.02, and the I parameter is the linear
interpolation between F08.01 and F08.03.
• The system response can be expedited through increasing the ASR KP (F08.00, F08.02), but oscillation
may occur if the value of KP is too high.
• The system response can be expedited through increasing the ASR KI (F08.01, F08.03), but oscillation and
high overshoot happen easily if the value of KI is too high.
• If F08.01/F08.03 = 0 and the integral function is disabled, the speed-loop works only as a proportional
regulator.
• Generally, adjust the KP firstly to the Max. condition that the system does not vibrate, and then adjust
the KI to shorten the response time without overshoot.
• To shorten dynamic response time during low frequency running, increase KP and KI.
0.0 - 200.0 (F07.02) [180.0%]
It is used to limit the Max. value of the vector control speed-loop integral.
Defines the vector control speed-loop differential time.
• Generally, it doesn’t need to set F08.07 except for expediting the dynamic response.
• F08.07 = 0, there is no speed-loop differential.
It is used to filter the output of ASR regulator.
• F08.08 = 0, the speed-loop filter is unused.
Frequency feedback
Frequency command
Error
PID
Torque limit
T
orq
ue current setting
+
-
F08.04 F0
8.0
5
F
08.
00 /
F0
8.0
1
F
08.
02 /
F0
8.03
0 Fr
equen
cy
PI Para
mete
r
 Loading...
Loading...