ecification
[VER-IN/OUT] (Input/Output Variables)
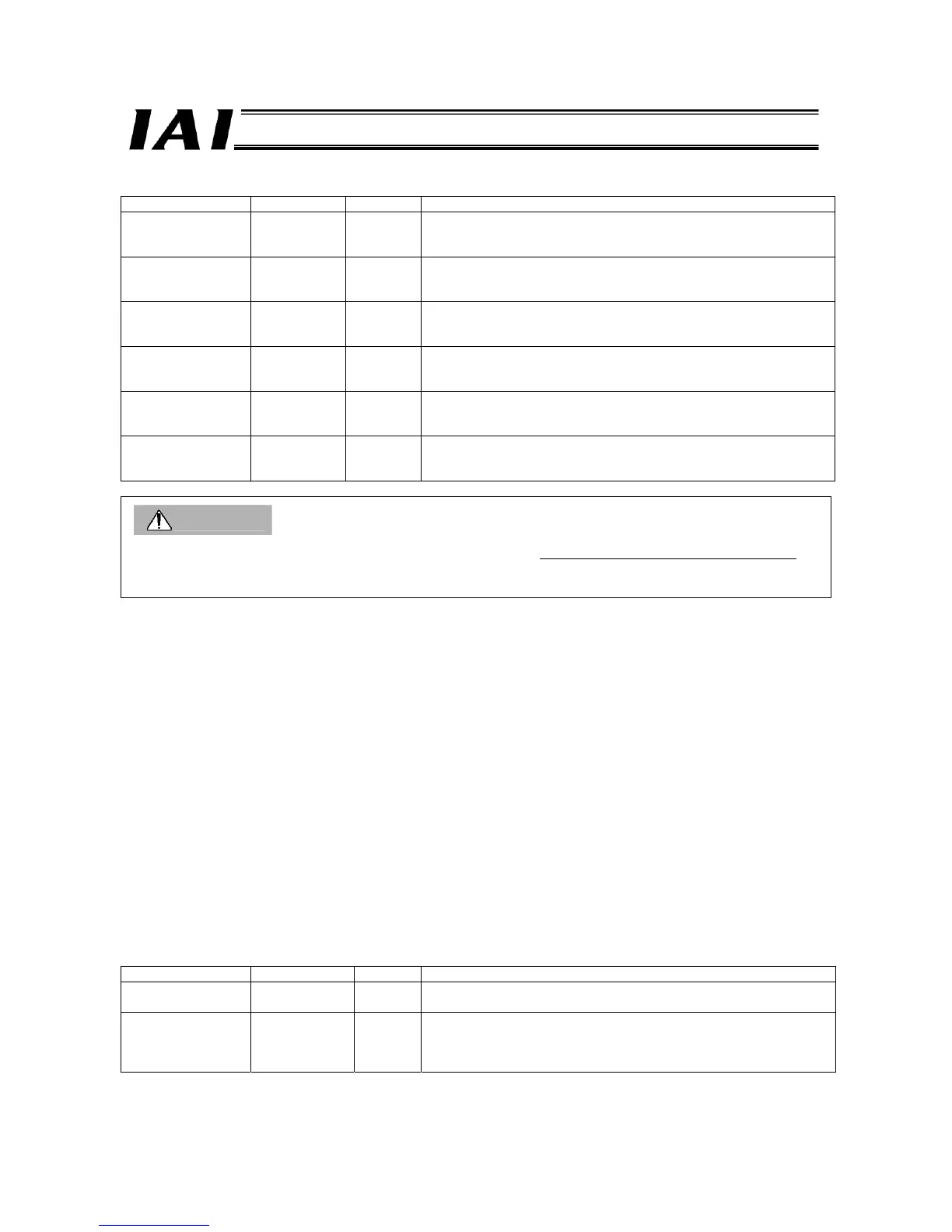
Name Variable name Data type Explanation of variable and parameter settings
Gateway information
table
GateWay
Information
_Table
INT [2] Gateway information data is returned.
Set the I/O memory address to be assigned to the initial status
signal address of the gateway.
Gateway control
table
GateWay
Control
_Table
INT [2] Gateway control data is placed.
Set the I/O memory address to be assigned to the initial control
signal address of the gateway.
Command request
table
Command
Request
_Table
INT [6] Request command data is placed.
Set the I/O memory address to be assigned to the initial request
command area address of the gateway.
Command response
table
Command
Response
_Table
INT [6] Command response data is returned.
Set the I/O memory address to be assigned to the initial response
command area address of the gateway.
Axis data write table DataWrite
_Table
INT [64] A command for each axis is placed.
Set the I/O memory address to be assigned to the initial axis input
area (PLC output) address of the gateway.
Axis data read table DataRead
_Table
INT [64] A monitored value of each axis is returned.
Set the I/O memory address to be assigned to the initial axis output
area (PLC input) address of the gateway.
Caution
Before setting the parameters or creating a ladder sequence, create an association matrix of SIO gateway addresses as
explained later.
(Supplement) [Internal] (Internal Variables)
Internal variables are not output to outside the FB.
Name Variable name Data type Explanation of variable and parameter settings
Modbus
Error code
MODBUS_
ErrorCode
WORD A Modbus error code is output. “#0000” is output if the command was
successful.
Continuation-upon-
error setting flag
ERR
_Setting
BOOL Whether to continue or stop the read operation upon communication
error is set.
0: Stop the read operation when a communication error occurs.
1: Retry continuously even after a communication error occurs.

 Loading...
Loading...




