ecification
3.8.3 Basic Operation Timings
(1) Ready
Follow the steps below to start the system after confirming that the slider or rod is not contacting a mechanical end and
the load is not contacting any peripherals, either:
[1] Cancel the emergency stop or enable the motor drive power.
[2] Supply the 24-VDC controller power (24-V terminal and 0-V terminal on the power-supply terminal block).
[3] Initialize the minimum parameter(s) required.
(Example) • To change the feed speed during teaching:
Change the value of parameter No. 35, “Safety speed.”
[4] In the positioner mode or simple direct mode, set optimal values in the “Position,” “Speed,” “Acceleration,”
“Deceleration” and other fields of the position table.
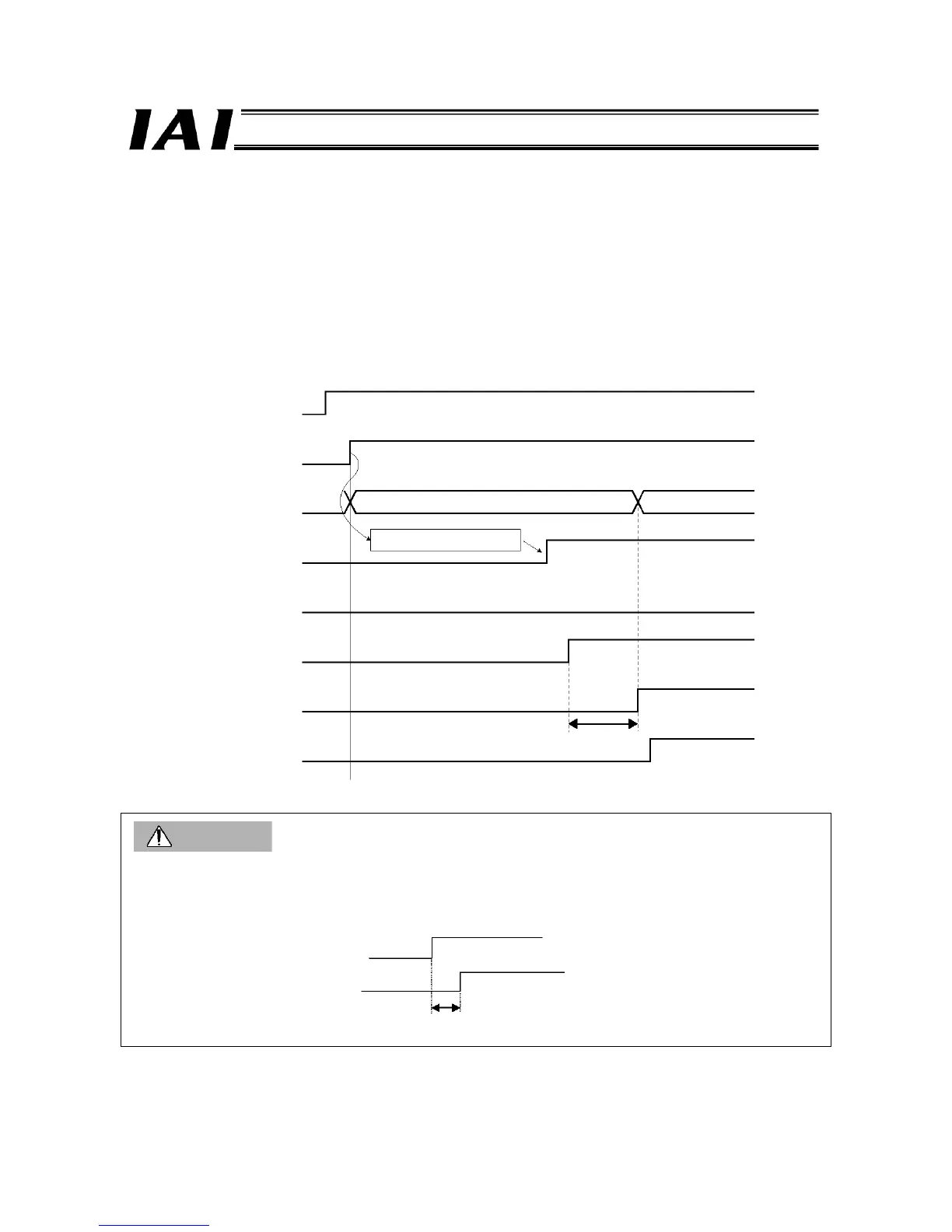
Caution
If the power is turned ON while an emergency stop is actuated and then the emergency stop is cancelled (SON signal “1”
(ON)), it will take a maximum of 1.6 seconds after the cancellation of emergency stop for the servo to turn ON.
Emergency stop cancelled
Servo ON
1.6 sec or less
Safety circuit status
Supply of 24-VDC
controller power
Emergency stop cancelled
SV lamp
(front panel)
A steady orange light comes on only for 2 seconds,
and then turns OFF.
Green
Controller ready
(CRDY)
Initial parameter setting
Pause (STP)
Pause cancelled
Servo ON command
(SON)
Ready (SV)
Position complete
(PEND)
1.6 sec or less
“0” (OFF)

 Loading...
Loading...




