ecification
I/O Signal List
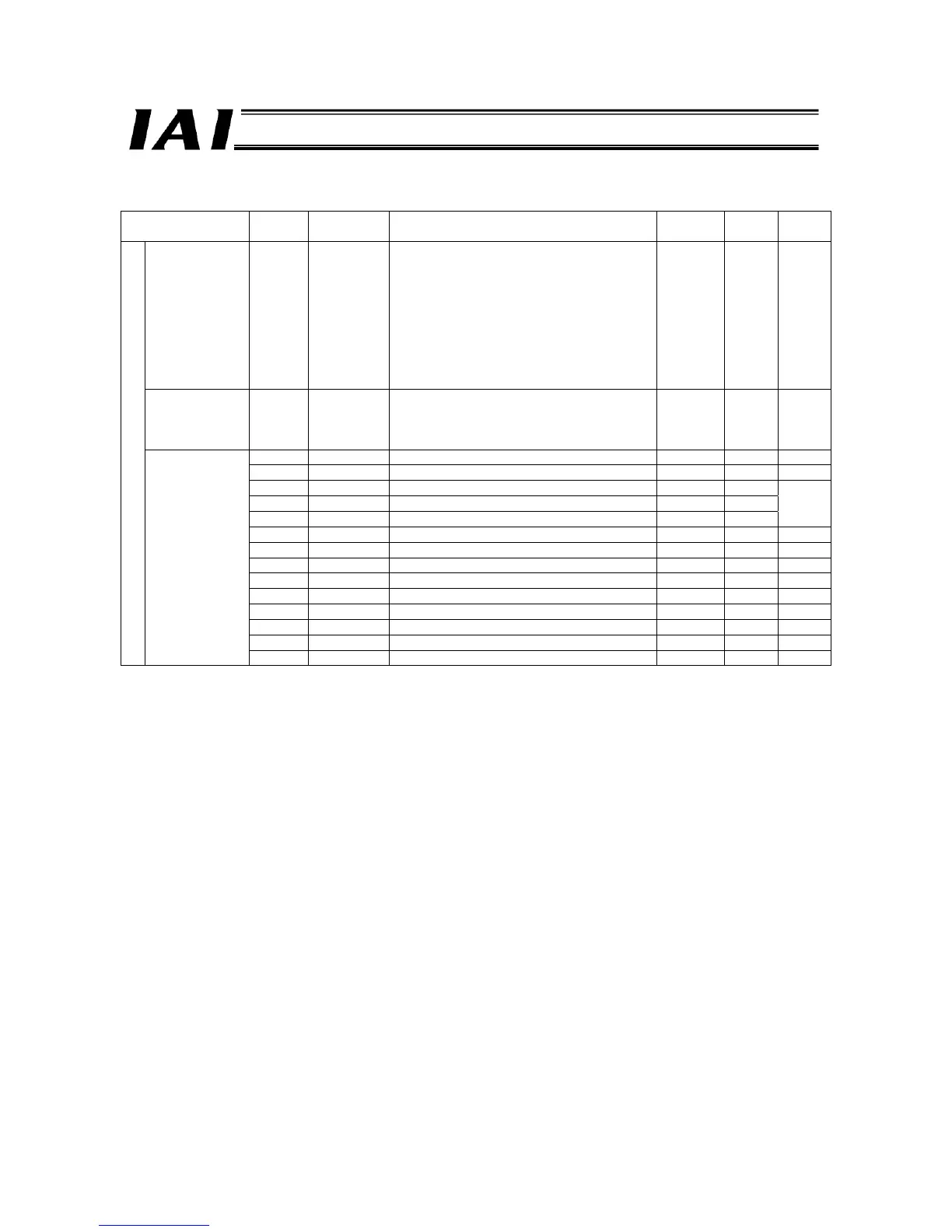
Signal type Bit Signal name Description Positioner
Simple
direct
Details
Current position
data
32-bit
data
- Output as a hexadecimal number using a
32-bit signed integer (unit: 0.01 mm).
Example) To set +25.4 mm, specify
“0009EC” (decimal number: 2540).
z The maximum settable value is +9999.99
mm = 999999 (decimal number) =
0F423FH (hexadecimal number).
z Since a negative value is indicated as a 2’s
complement, the most significant bit
becomes “1.”
{ {
3.8.3
(4)
3.8.2 (12)
Completed
position number
b9-b0 PM***
The completed position number is read as a
binary number. A simple alarm code is output
while an alarm is present.
{ {
3.8.3 (3)
b15 EMGS Emergency stop status
{ {
3.8.2 (2)
b14 CRDY Controller ready
{ {
3.8.2 (1)
b13 ZONE2 Zone output monitor 1
{ {
3.8.2 (13)
b12 ZONE1 Zone output monitor 2
{ {
b11 PZONE Position zone output monitor
{
X
b10 MODES Teaching mode status
{
X
3.8.2 (18)
b9 WEND Position data load command status
{
X
3.8.2 (18)
b8-b6 - Cannot be used. - -
-
b5 PSFL Missed load in push operation
{ {
3.8.4 (1)
b4 SV Ready (servo ON)
{ {
3.8.2 (5)
b3 ALM Alarm present
{ {
3.8.2 (3)
b2 MOVE Moving
{ {
3.8.2 (8)
b1 HEND Home return complete
{ {
3.8.2 (6)
PLC input
Control signal
b0 PEND Position complete
{ {
3.8.2 (9)
{: Available X: Not available

 Loading...
Loading...




