20 Troubleshooting
20. Troubleshooting
This section explains causes of error occurrence and actions to be taken.
20.1. Occurrence of Error Numbers in the Range from 9000 to 9999
This section describes causes of errors that may occur while starting a program and how to handle them.
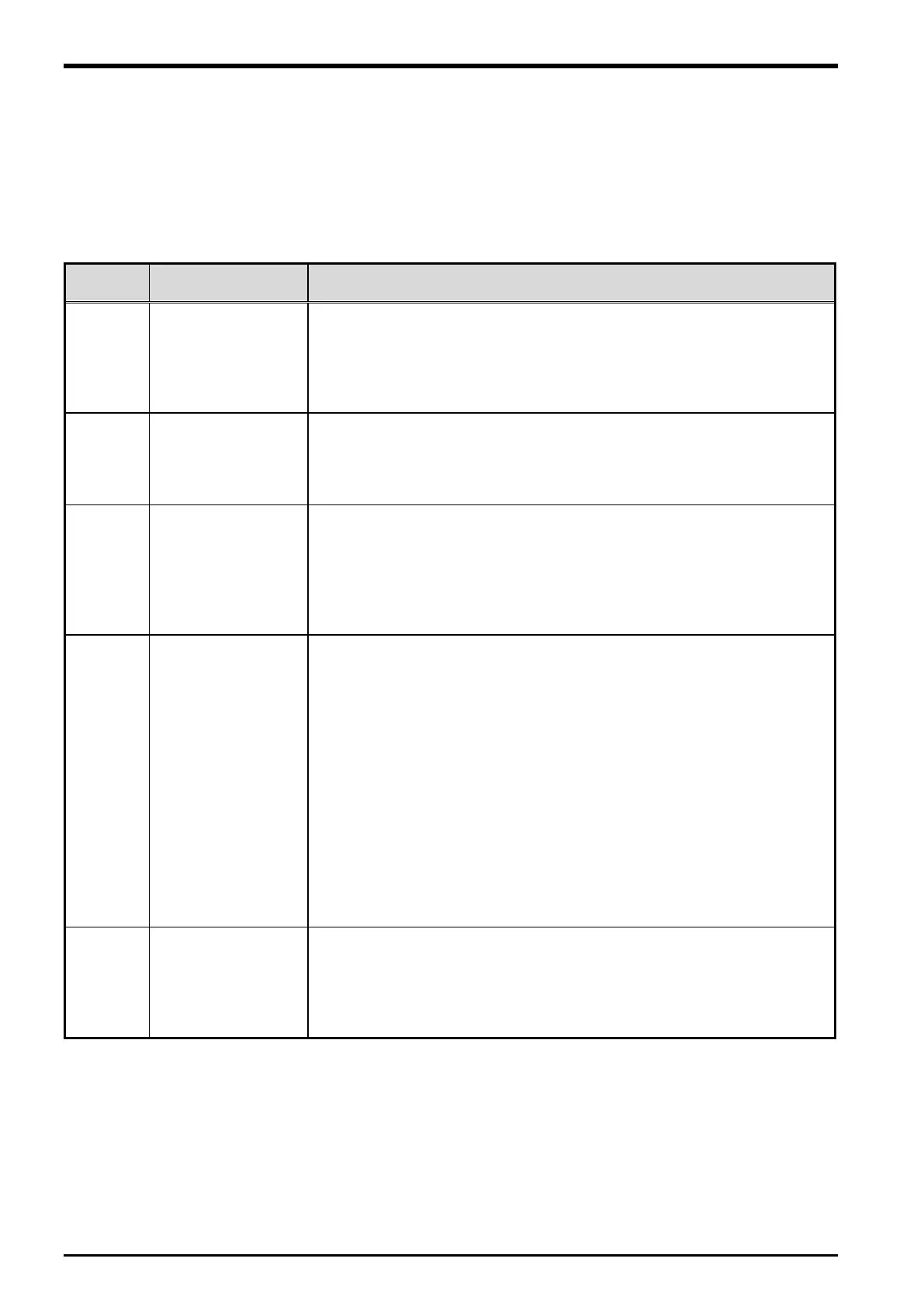
Table 20
−1 List of Errors in Sample Programs
Error description Causes and actions
error
The network vision sensor and the robot cannot be connected by the
“C1” program or the robot cannot log on the vision sensor.
[Actions]
1) Check the Ethernet cable which connects the robot with the network
of range
The encoder number specified in “A1” program to “C1” program is ”0”
or ”9” or larger.
[Actions]
1) Check the X coordinate of the position variable ”PE” in the programs.
range
The model number specified in “C1” program is ”0” or ”10” or larger.
[Actions]
1) Check the X coordinate of the position variable “PRM1” in “C1”
program.
2) If there are more than 11 models, change “MWKMAX=10” line in
out of range
The workpiece position calculated by operations in “A1” program to “C1”
program is very different from the theoretical value.
The example is shown in (*1).
[Actions]
1) Check the X and Y coordinates of the position variable ”PVTR” in
“CM1” program. These values represent the difference from the
theoretical value.
2) If the difference stored in “PVTR” is large, run “A1” program to “C1”
program again.
3) Please add the value of positional variable “PCHK" in the 'CM1'
program when the hand offsets from time when the calibration was
executed and add the amount of the offset.
4) Check that the X and Y coordinates of the position variable ”PCHK”
in “CM1” program are not ”0.” If they are ”0,” change the difference
from the theoretical value to an allowable value.
A return value cannot be created by the *S50WKPOS function of “1”
program.
[Actions]
1) Check the reason why “MY50STS” of the *S50WKPOS function in “1”
program does not change from”0”.
20-98 Occurrence of Error Numbers in the Range from 9000 to 9999

 Loading...
Loading...



