20 Troubleshooting
20.3. In such a case (improvement example)
Explain the improvement example, when building the tracking system using the sample robot program.
20.3.1.
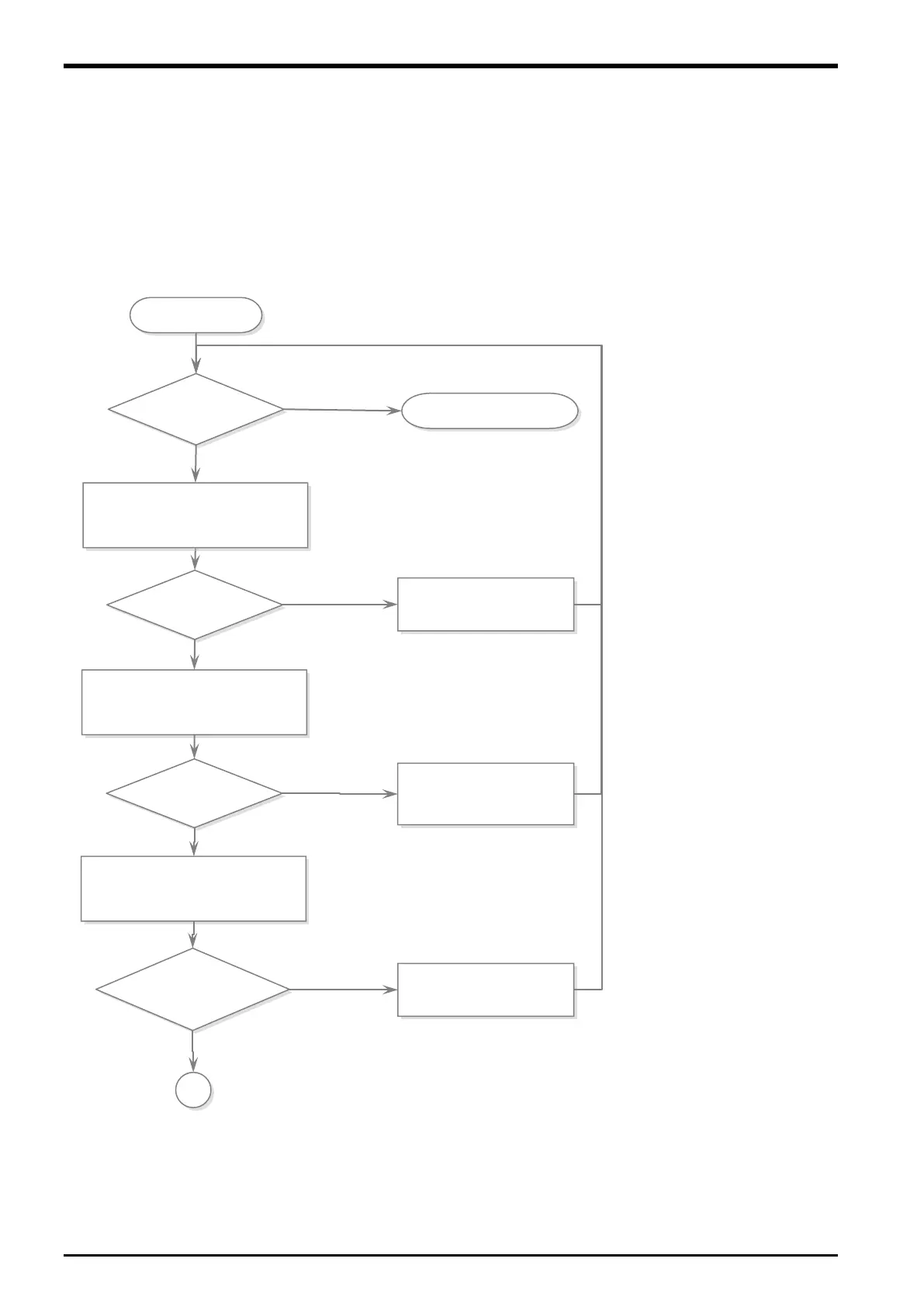
The adsorption position shifts.
When the place that shifts from the specified adsorption position has been adsorbed, the cause is
investigated according to the following procedures.
program again.
the vision sensor.
calibration
The position
doesn't shift.
Recognition is
defective.
【
】
Confirm whether neither the
encoder nor the conveyer slip.
【
】
Check whether to recognize the
image center correctly.
【
】
Check whether the calibration is
correct.
1
20-102 In such a case (improvement example)

 Loading...
Loading...



