19 Maintenance of robot program
19. Maintenance of robot program
This chapter explains information required when maintaining the sample programs (robot program language
MELFA-BASIC V and dedicated input/output signals).
19.1. MELFA-BASIC V Instructions
The lists of instructions, status variables and functions related to tracking operation are shown below.
Please refer to the separate manual “Detailed Explanations of Functions and Operations” for further
information about MELFA-BASIC V.
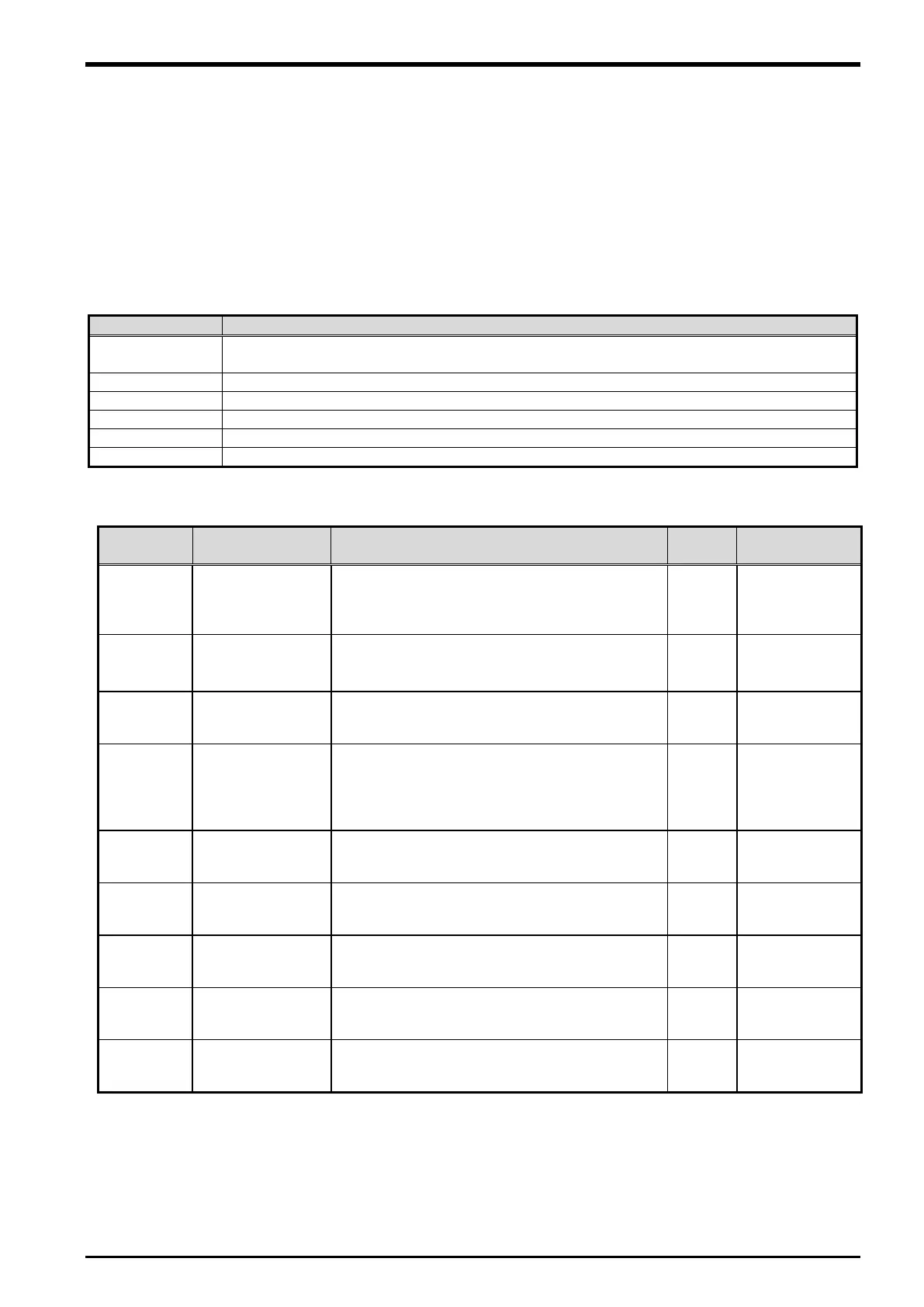
19.1.1. List of Instructions
Table 19−1 List of Instructions
Specify the workpiece coordinate origin of teaching data and tracking external encoder
logic number.
Clear the tracking data buffer.
Declare start and end of the tracking mode.
Output signals from a general-purpose output and read the encoder values.
Read workpiece data from the tracking data buffer.
Write workpiece data in the tracking data buffer.
19.1.2. List of Robot Status Variables
Table 19−2 List of Robot Status Variables
Number of arrays Function
Data type
encoders
1 to 8
External encoder data can be rewritten.
If this state variable does not set parameter
“TRMODE" to “1", the value becomes like “0".
n real number
encoder
1
8
※
Possible to use from R1 and S1
※
n real number
encoders
Amount of robot movement per encoder pulse
*This state variable is made by sample “A1”
1 to The first
argument of
parameter
Number of data items stored in the tracking buffer
encoders
Conveyer speed (mm, rad/sec)
encoders
The maximum value of external encoder data
n real number
encoders
The minimum value of external encoder data
n real number
encoders
External encoder speed(Unit: pulse/sec)
real number
1 to 3
Tracking operation status of specified mechanism
1: Tracking
(*1)R: Only reading is permitted. R/W: Both reading and writing are permitted.
MELFA-BASIC V Instructions 19-87

 Loading...
Loading...



