6 Parameter Setting
6. Parameter Setting
This chapter explains how to set dedicated input/output signals that play the role of interface between a robot
and an external device (e.g., a Programmable Logic Controller) and parameters related to the tracking function.
Please refer to “Detailed Explanations of Functions and Operations” for how to set the parameters.
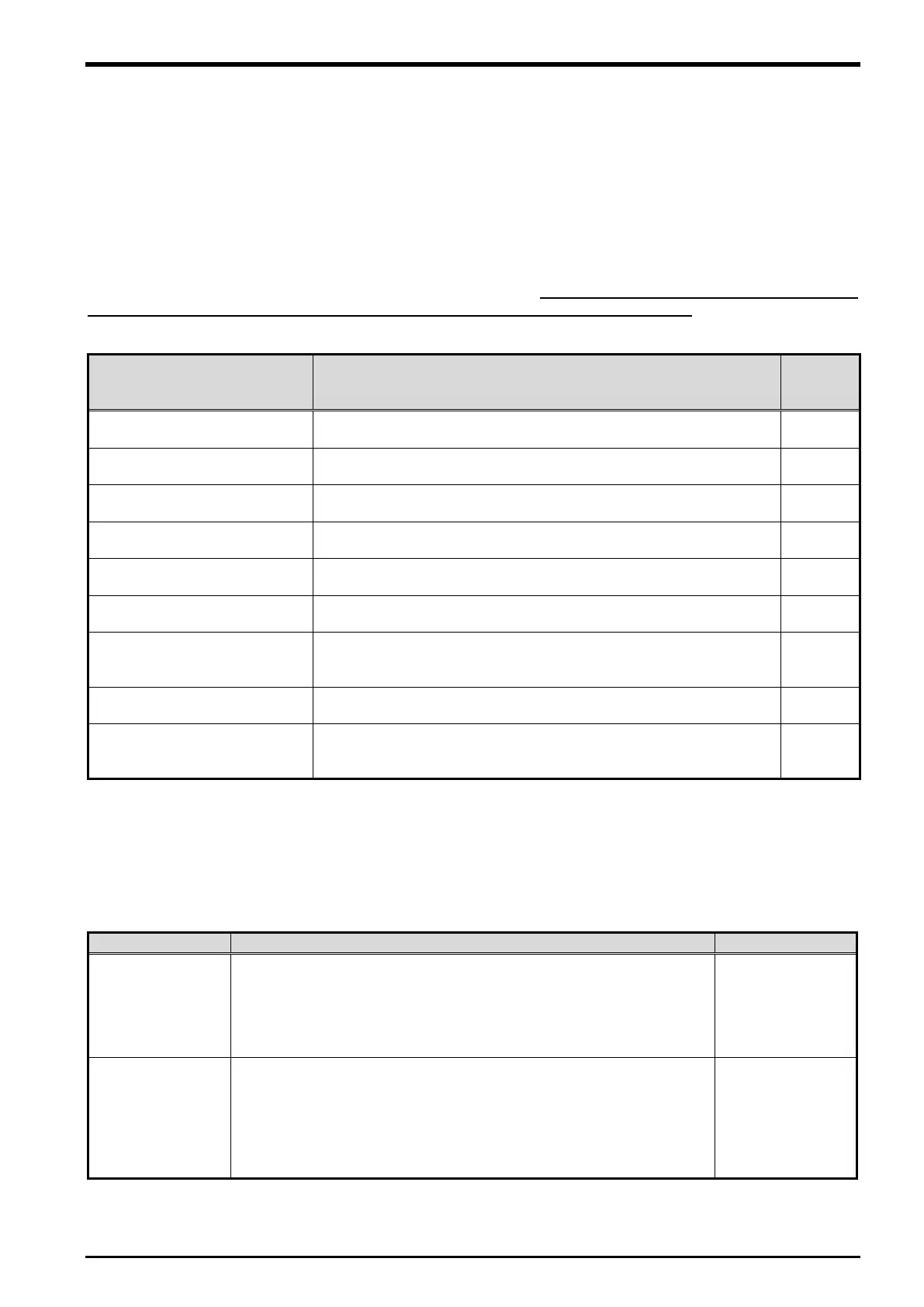
6.1. Dedicated Input/Output Parameters
“Table 11
−
1 List of Dedicated Input/Output Parameters” lists the setting items of dedicated input/output
parameters used to operate the robot via instructions from an external device. Set the signal numbers according
to your system using the setting values in the table as reference.
It is not necessary to set these parameters
if the robot operates by itself, rather than via instructions from an external device.
Table 6
−1 List of Dedicated Input/Output Parameters
Input name/output name
(parameter name)
Explanation
Example
Stop/pausing
(STOP) or (STOP2)
Input: Stop a program
Output: Output program standby status
Servo OFF/servo ON disabled
(SRVOFF)
Input: Turn the servo off
Output: Output servo ON disabled status
10011 ,
Error reset/error occurring
(ERRRESET)
Input: Cancel error status
Output: Output error status
10009 ,
Input: Start automatic operation
Output: Output program running status
Servo ON/turning servo ON
(SRVON)
Input: Turn the servo on
Output: Output servo on status
Operation right/operation right
enabled (IOENA)
Input: Enable/disable operation right of external signal control
Output: Output external signal control operation enabled status
10005 ,
selectable
Input: Initiate a program. The program execution returns to the
first step.
Output: Output a status where program No. can be changed
10008 ,
-1
General output signal reset
(OUTRESET)
Input: Reset a general output signal
10015 ,
User specification area 1
(USRAREA)
Output an indication that the robot is in an area specified by a
user
Set the start number and end number
10064,
10071
(*1) “-1” in the Setting value column means “not set.”
6.2.
Operation Parameters
“Table 11
−
2 List of Operation Parameter” lists the setting items of parameters required to operate the robot at
the optimal acceleration/deceleration.
Table 6
−2 List of Operation Parameter
acceleration/
deceleration hand
data
(HANDDAT1)
Specify hand weight and so on to make settings that allow optimal
acceleration/deceleration operations.
For example, if the hand weighs 3 kg, changing the weight setting
value from 10 kg to 3 kg makes the robot movement faster.
(Hand weight (kg), size (mm) X, Y, Z, gravity (mm) X, Y, Z)
The setting values
are different for
each robot model.
Use these values
acceleration/
deceleration
workpiece data
(WRKDAT1)
Specify workpiece weight and so on to make settings that allow
optimum acceleration/deceleration operations.
If a workpiece is grabbed via the HClose instruction, the
acceleration/deceleration becomes slower. If a workpiece is
released via the HOpen instruction, acceleration/deceleration
becomes faster.
(Workpiece weight (kg), size (mm) X, Y, Z, gravity (mm) X, Y, Z)
The setting values
are different for
each robot model.
Use these values
as reference only.
Dedicated Input/Output Parameters 6-25

 Loading...
Loading...



