8 Specification
8. Specification
8.1. Tracking Specifications and Restriction matter
”Table 3−1 CR750-Q/CR751-Q Series, CRnQ-700 Series Controller Tracking Function Specifications”
shows the tracking specifications.
Please refer to “Standard Specifications Manual” for the specifications of the robot arm and controller to be
used.
Table 8
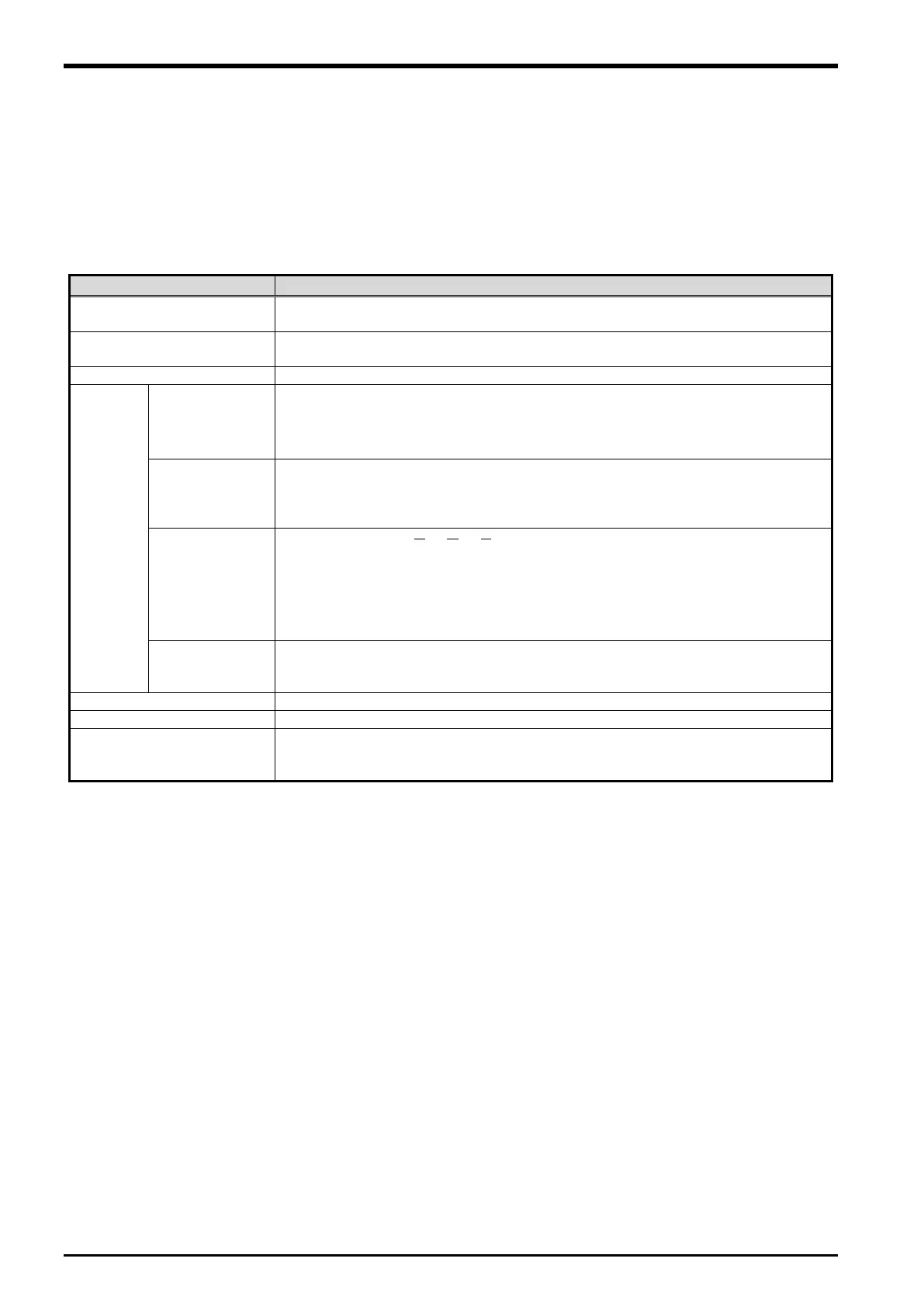
−1 CR750-D/CR751-D Series, CRnD-700 Series Tracking Function Specifications
Specification and Restriction matter
RH-SDH series / RV-SD series
RH-FH-D series / RV-F-D series
Applicable robot controller
CR1D/ CR2D/CR3D contoller
CR750-D/CR751-D series controller
Load commands dedicated for the tracking function
conveyer
(
in case 1pcs encoder connect to 1pcs conveyer
)
Encoder 2pcs / Robot controller 1pcs
The robot controller can correspond to two conveyers by the standard
specification.
speed (*1)
Possible to support up to 300 mm/s (When the robot always transport the
workpieces)
Possible to support up to 500 mm/s when the interval of workpiece is wide.
Possible to support two conveyers by one Robot controller.
Output aspect :
Output form : line driver output (*2)
Highest response frequency : 100 kHz
Resolution(pulse/rotation) : Up to 2000 (4000 and 8000 uncorrespond)
Confirmed operation product : Omron E6B2-CWZ1X-1000
Shielded twisted-pair cable
Outside dimension : Maximum phi6mm
Conductor size: 24AWG (0.2 mm
2
) Cable length: Up to 25 m
Photoelectronic sensor (*3)
Used to detect workpieces positions in conveyer tracking.
Mitsubishi’s network vision sensor
position (*5)
Approximately ±2 mm (when the conveyer speed is approximately 300 mm/s)
(Photoelectronic sensor recognition accuracy, vision sensor recognition
accuracy, robot repeatability accuracy and so on)
(*1) The specification values in the table should only be considered guidelines. The actual values
depend on the specific operation environment, robot model, hand and other factors.
(*2) The line driver output is a data transmission circuit in accordance with RS-422A. It enables the
long-distance transmission.
(*3) The output signal of a photoelectronic sensor must be connected to a general input signal (arbitrary)
of the robot controller.
(*4) In the case of vision tracking, please refer to the instruction manual of network vision sensor.
(*5) The precision with which workpieces can be grabbed is different from the repeatability at normal
transportation due to the conveyer speed, sensor sensitivity, vision sensor recognition accuracy and
other factors. The value above should only be used as a guideline.
(*6) The sample program doesn't correspond to the RV-5 axis robot.
8-36 Tracking Specifications and Restriction matter

 Loading...
Loading...



