14 Calibration of Vision Coordinate and Robot Coordinate Systems (
“
B1
”
program)
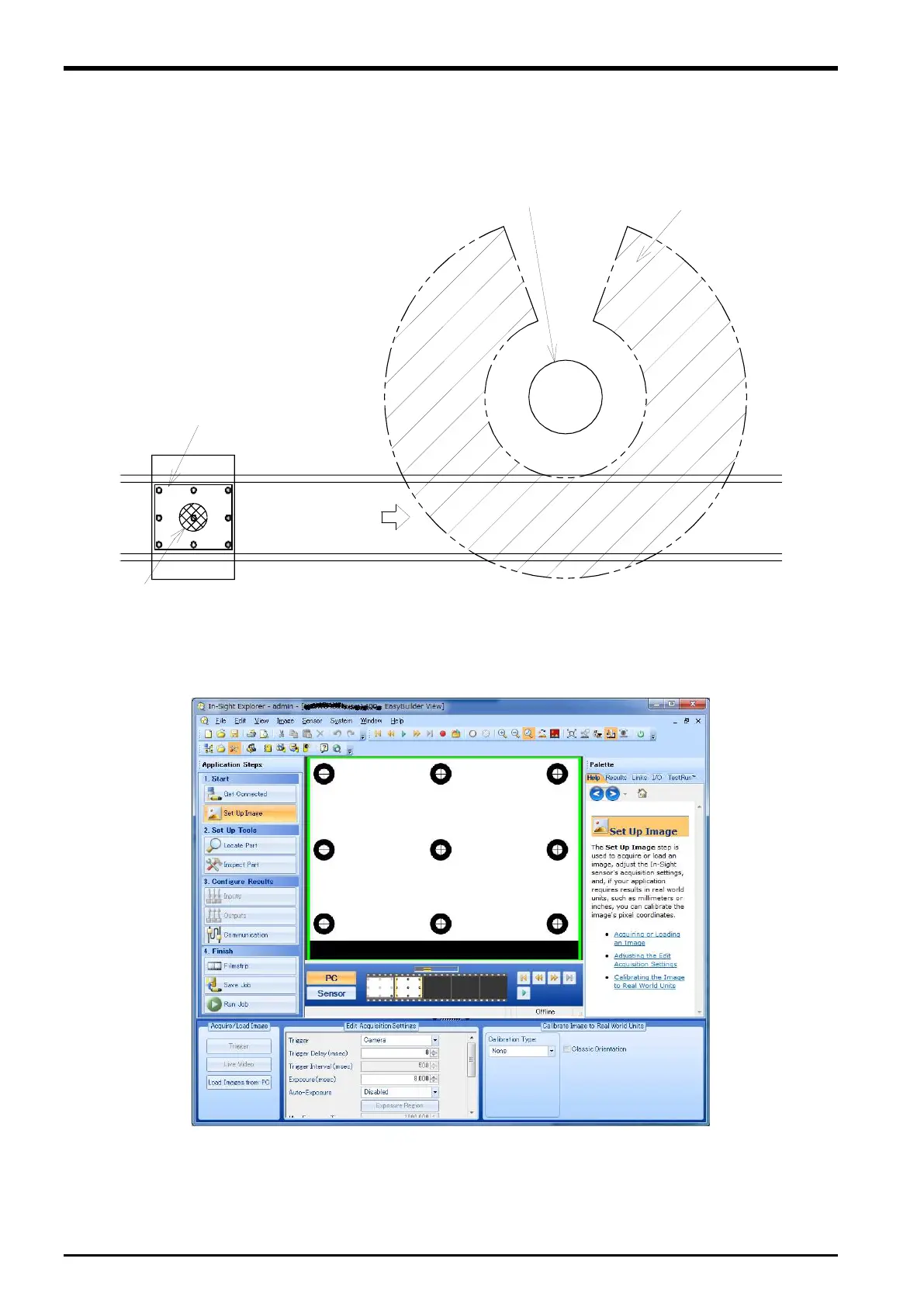
3) Paste appendix calibration seat to "Mitsubishi robot tool manual for EasyBuilder" on the conveyer.
Paste calibration seat within the field of vision checking the live images of In-Sight Explorer.
* With this operation, encoder data is acquired.
Figure 14
−2 Pasting Calibration seat
Figure 14
−3 Screen of In-Sight Explorer from which calibration seat is taken picture
14-58 Tasks

 Loading...
Loading...



