15 Workpiece Recognition and Teaching (
“
C1
”
program)
15.2. Program for Vision Tracking
Vision tracking “C1” program acquires encoder data at the position where the vision sensor recognizes
workpieces and where the robot suctions workpieces such that the robot can recognize the work
coordinates recognized by the vision sensor. The following explains the operation procedure and items to
confirm after operation in vision tracking “C1” program.
(1) Operation procedure
1) Register workpieces to be recognized by a vision sensor and create a vision program.
Please refer to "In-Sight Explorer manual" for the method of making the vision program.
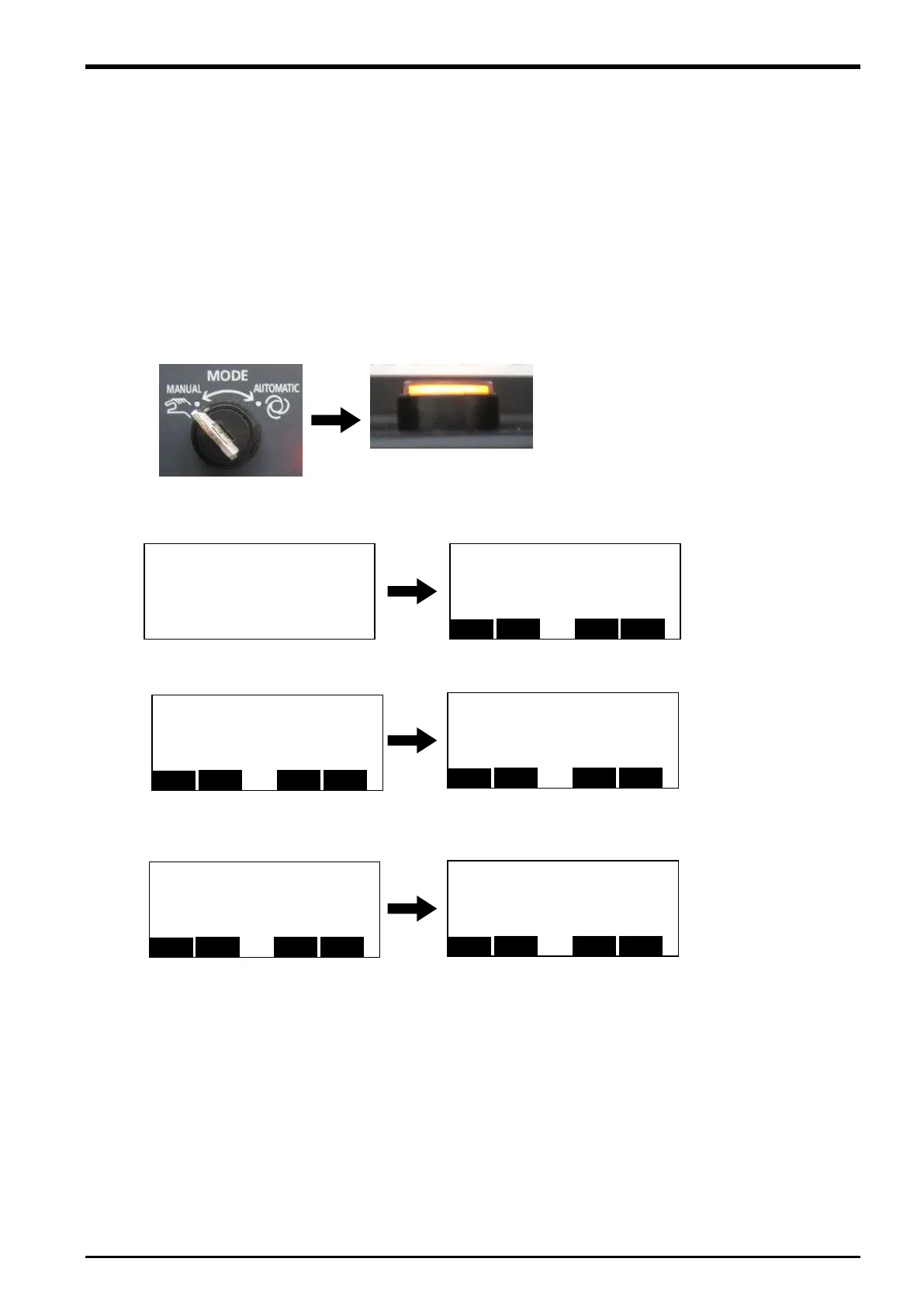
2) Open “C1” program using T/B.
3) Set the controller mode to "MANUAL".
Set the T/B to "ENABLE".
4) Press one of the keys (example, [EXE] key) while the <TITLE> screen is displayed. The <MENU>
screen will appear.
5) Select "1. FILE /EDIT" screen on the <MENU > screen.
6) Press the arrow key, combine the cursor with the program name "C1" and press the [EXE] key. Display
the <program edit> screen.
O
P
T
B
:
:ENABLE
★
Lamp lighting
T
B
2 '# tracking robot‐conveyor calibra
4 '# Create/version : 2006.04.21 A1
1 '## Ver.A1 ########################
<FILE/EDIT> 1/ 20Rem 136320
<FILE/EDIT> 1/ 20Rem 136320
COPYRIGHT (C) 2011 MITSUBISHI ELEC
TRIC CORPORATION ALL RIGHTS RESE
Program for Vision Tracking 15-67

 Loading...
Loading...



