6 Parameter Setting
6.3. Tracking Parameter Setting
Specify to which channel of the encoder connector (CNENC) an encoder of conveyer is connected.
“Table 6-3 Tracking Parameter Setting” lists the parameters to be set. Other parameters are shown in “Table
21-1 List of Tracking Parameters”, make settings as required.
6.3.1. Robot Parameter Setting
After the installation of Q173DPX module and connection with the encoder are complete, use the following
steps to establish robot CPU parameters.
(1) Using parameter ENCUNT* (*=1~3), designate the slot in which Q173DPX module under the control of robot
CPU is installed.
(2) Change the number of the incremental synchronization encoder being physically wired into a logic number,
using parameter EXTENC.
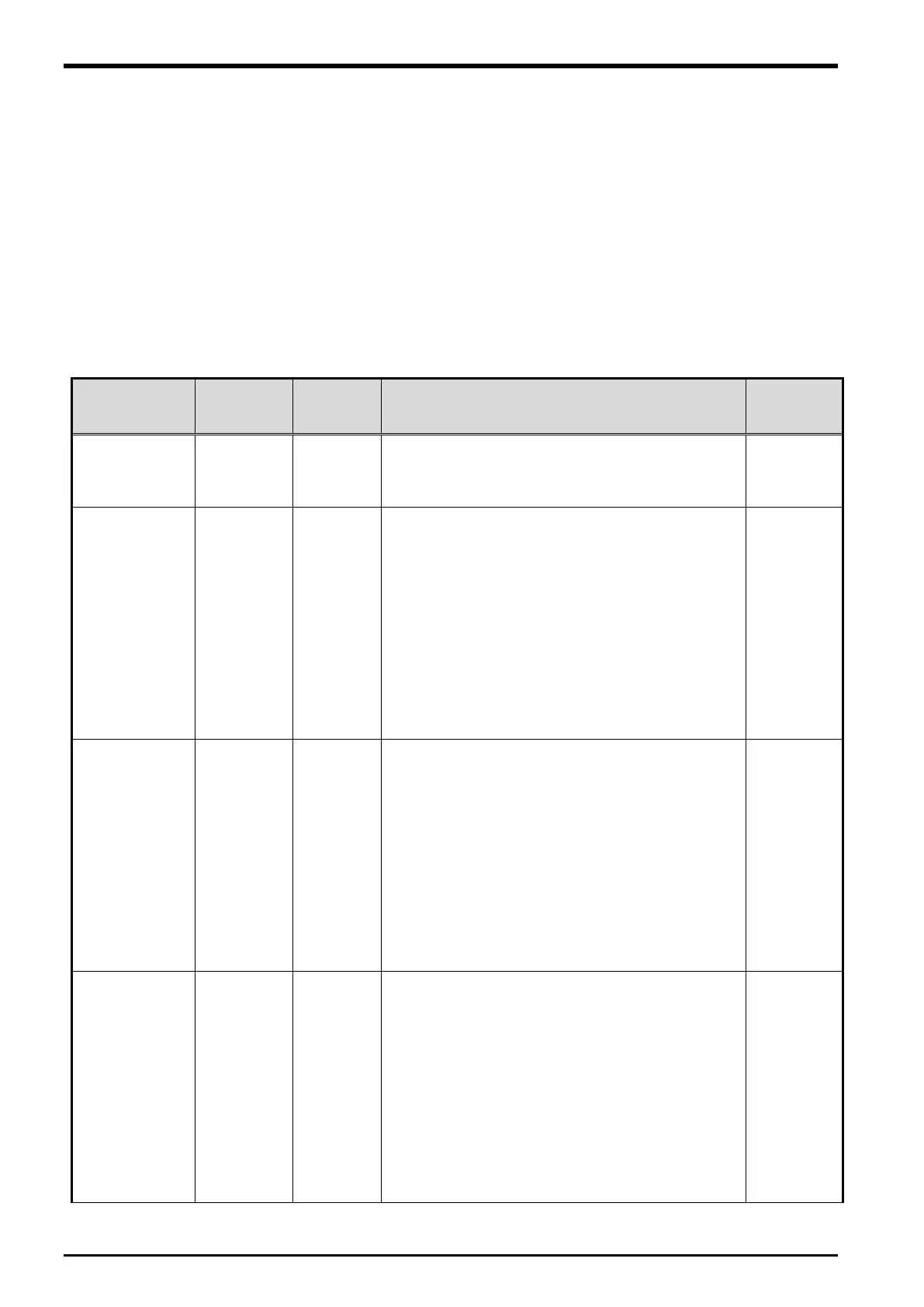
Table 6-3
Tracking Parameter Setting
Parameter
Parameter
name
Number of
elements
Explanation
at factory
Enable the tracking function
Please set it to “1" when you use the tracking
function.
The base unit-number of the first Q173DPX unit
(element 1) that robot CPU manages and slot
number (element 2) are set.
【
Element
1】
-1
:
No connection
0
:
Basic base unit
1~7
:
Increase base unit
【
Element
2】
0~11
:
I/O Slot number
*
This parameter is valid in the following
software versions.
・
CRnQ-700 series: Ver. R1 or later
Q173DPX
The base unit-number of the second Q173DPX
unit (element 1) that robot CPU manages and slot
number (element 2) are set.
【
Element
1】
-1
:
No connection
0
:
Basic base unit
~7
:
Increase base unit
【
Element
2】
0~11
:
I/O slot number
*
This parameter is valid in the following
software versions.
・
CRnQ-700 series: Ver. R1 or later
The base unit-number of the third Q173DPX unit
(element 1) that robot CPU manages and slot
number (element 2) are set.
【
Element
1】
-1
:
No connection
0
:
Basic base unit
~7
:
Increase base unit
【
Element
2】
0~11
:
I/O slot number
*
This parameter is valid in the following
software versions.
・
CRnQ-700 series: Ver. R1 or later
6-26 Tracking Parameter Setting

 Loading...
Loading...



