15 Workpiece Recognition and Teaching (
“
C1
”
program)
7) Press the [FUNCTION] key, and change the function display
8) Press the [F1] (FWD) key and execute step feed. "(1)Vision No ......." is displayed
9) Work according to the comment directions in the robot program.
10) Next "' (2) Encoder No.. Execute step feed to ".
11) Repeat (7) - (8) and execute step feed to "End."
12) Press the [F2] (JUMP) key and input the step number. Press the [EXE] key. Then returns to first step
13) Press the [FUNCTION] key, and change the function display. Press the [F4] (close) key and close the
program.
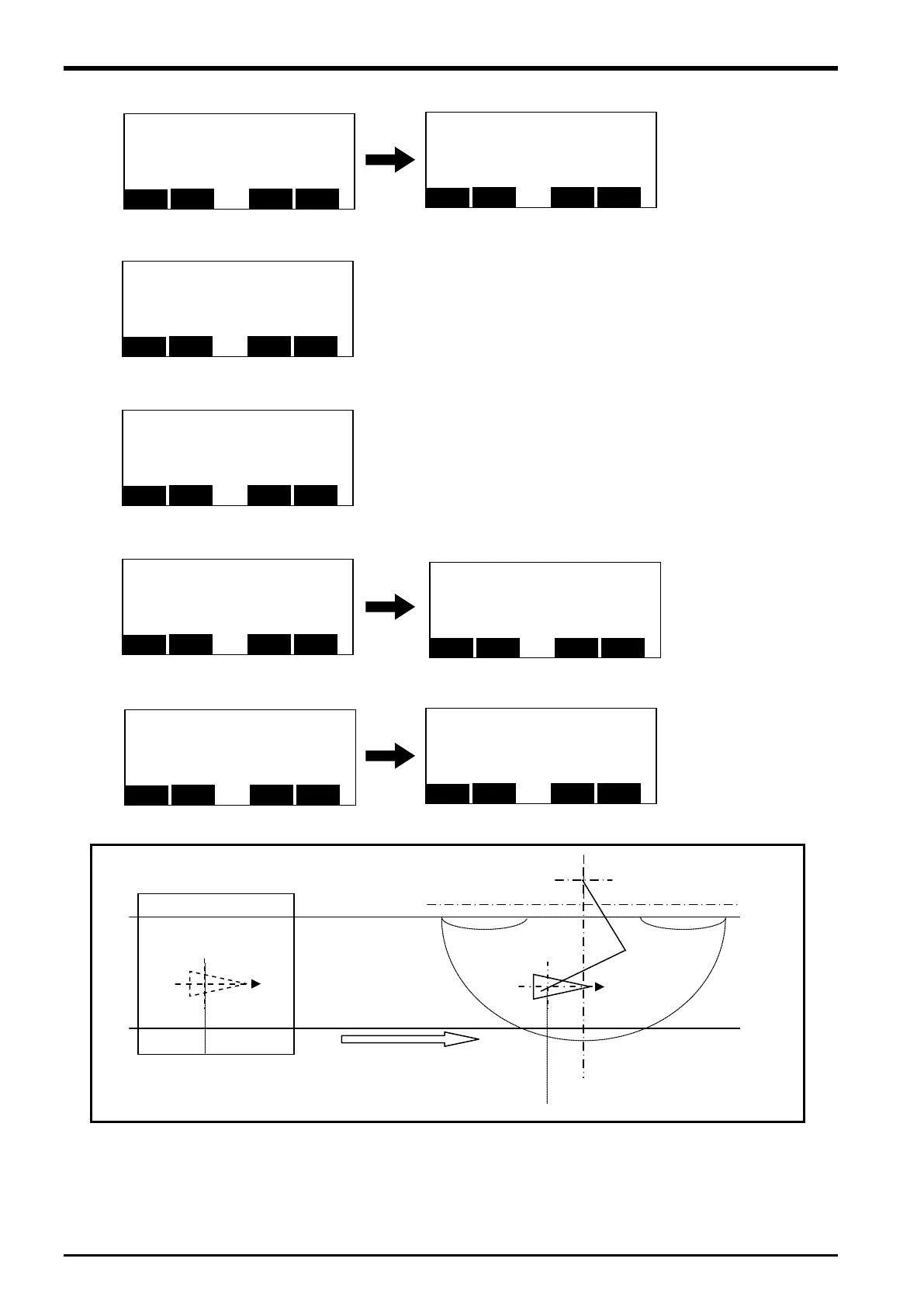
Figure 15
−2 Operation for Matching Workpiece Coordinates and Robot Coordinates
2 '# tracking robot‐conveyor calibra
4 '# Create/version : 2006.04.21 A1
1 '## Ver.A1 ########################
2 '# tracking robot‐conveyor calibra
4 '# Create/version : 2006.04.21 A1
1 '## Ver.A1 ########################
2 '# tracking robot‐conveyor calibra
4 '# Create/version : 2006.04.21 A1
1 '## Ver.A1 ########################
6 '##################################
5 '# COPYRIGHT : MITSUBISHI ELECTRIC
5 '# COPYRIGHT : MITSUBISHI ELECTRIC
6 '##################################
4 '# Create/version : 2006.04.21 A1
2 '# tracking robot‐conveyor calibra
4 '# Create/version : 2006.04.21 A1
1 '## Ver.A1 ########################
2 '# tracking robot‐conveyor calibra
4 '# Create/version : 2006.04.21 A1
1 '## Ver.A1 ########################
workpiece
4) Move the robot
Encoder data acquisition
Workpiece position acquisition
Encoder data acquisition
Read the current value
Vision sensor
recognition area
(2) Recognize a workpiece with
the vision sensor
Raise the robot
15-68 Program for Vision Tracking

 Loading...
Loading...



