7 System Configuration
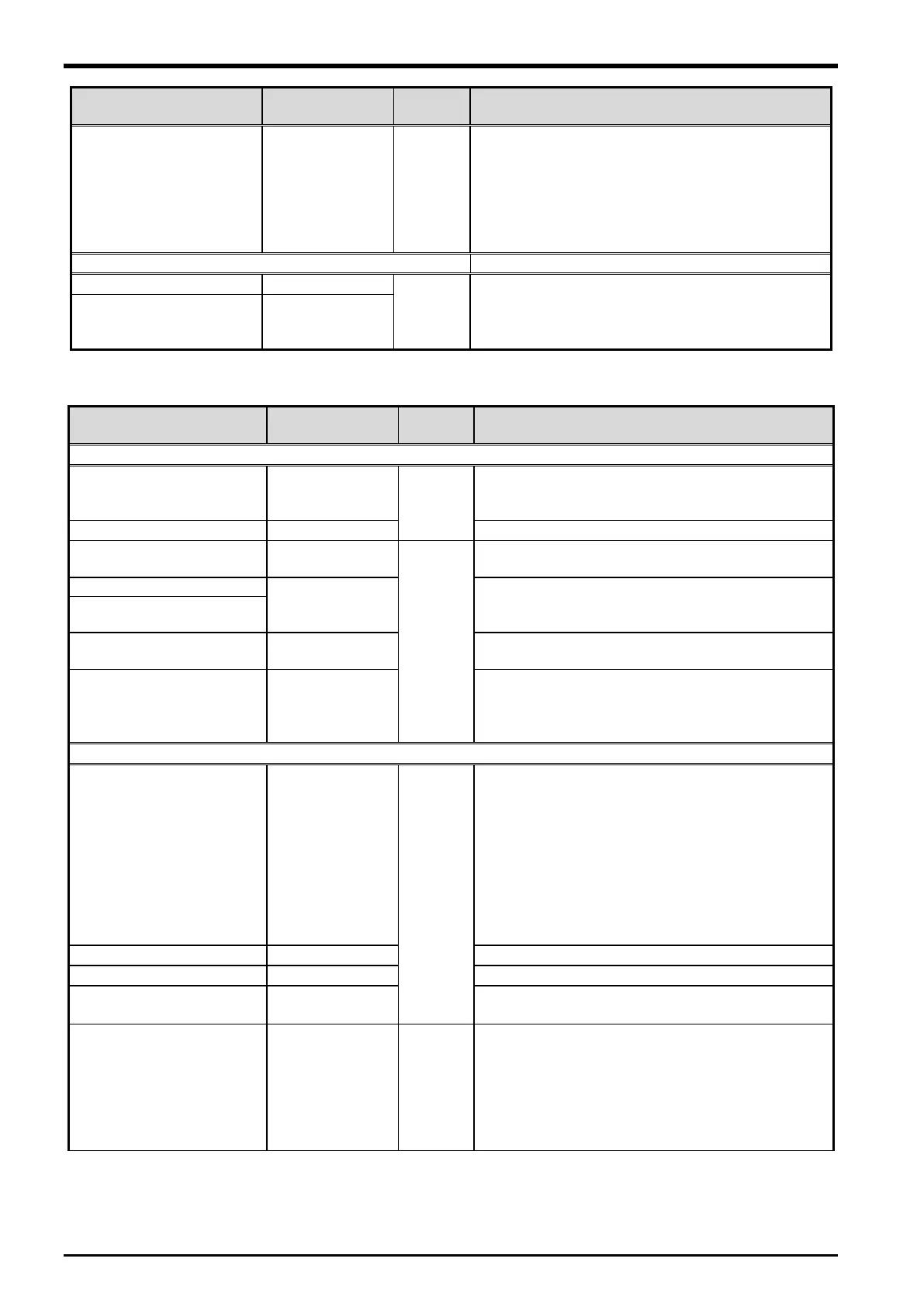
Name of devices to be
provided by customers
Model Quantity Remark
Encoder distribution unit
2F-YZ581 (1)
The Encoder distribution unit is required when two
or more robot controllers are connected to the one
encoder. Provide this unit as necessary.
If the Encoder distribution unit is used, a 5V power
source for the encoder is not necessary.
Refer to the Encoder Distribution Unit Manual
1
Please refer to the instruction manual of RT
ToolBox2 for the details of the personal computer
specifications.
(Personal computer
3D-11C-WINE
3D-12C-WINE
Table 7−3 List of Devices Provided by Customers (Vision Tracking)
Name of devices to be
provided by customers
Model Quantity Remark
or
1
−
(1)
Used to confirm that workpieces are gripped
correctly. Provide as necessary.
See the Remark
column
Different models are used depending on the robot
used. Check the robot version and provide as
(CRnQ-700/CRnD-700 series controller)
Provide as necessary.
−
This is a jig with a sharp tip that is attached to the
mechanical interface of the robot arm and used for
calibration tasks. It is recommended to use the jig if
high precision is required.
(with encoder)
−
1
Line driver output
[Confirmed operation product]
Omron encoder (E6B2-CWZ1X-1000 or -2000)
Encoder cable.
Twisted-pair cable with the shield.
(CRnD-700 series controller)
Recommended connector for encoder input
terminal:
10120-3000PE plug made by 3M
10320-52F0-008 shell made by 3M
+5 VDC (±10%) : For the encoder
Used to synchronize tracking
−
+24 VDC (±10%) :
For the Photoelectronic sensor and Vision sensor
Encoder distribution unit
2F-YZ581 (1)
The Encoder distribution unit is required when two
or more robot controllers are connected to the one
encoder. Provide this unit as necessary.
If the Encoder distribution unit is used, a 5V power
source for the encoder is not necessary.
Refer to the Encoder Distribution Unit Manual
7-32 Components

 Loading...
Loading...



