19 Maintenance of robot program
TrBase (tracking base)
[Function]
Specify the workpiece coordinate system origin during the teaching operation and the encoder logic number
of an external encoder used in tracking operation.
[Format]
TrBase <Reference position data> [ , <Encoder logic number>]
[Term]
<Reference position data> (can be omitted):
Specify the origin position of position data to be followed during the tracking mode.
<Encoder logic number> (can be omitted):
This is a logic number indicating the external encoder that performs tracking operation.
1 is set when this argument is omitted.
Setting range: 1 to 8
[Example]
1 TrBase P0 ' Specify the workpiece coordinate origin at the teaching position.
2 TrRd P1,M1,MKIND ' Read the workpiece position data from the data buffer.
3 Trk On,P1,M1 ' Start tracking of a workpiece whose position measured by a sensor is P1 and
encoder value at that time is M1.
4 Mvs P2 ' Setting the current position of P1 as P1c, make the robot operate while following
workpieces with the target position of P1c*P_Zero/P0*P2.
5 HClose 1 ' Close hand 1.
6 Trk Off ' End the tracking operation.
[Explanation]
Specify the workpiece coordinate system origin during the teaching operation and the logic number of an
external encoder used in tracking operation.
If an encoder logic number is omitted, the previously specified value 1 is set.
The reference position data and encoder number are set to their initial values until they are specified by
the TrBase instruction or the Trk On instruction. The initial value is P_Zero for the reference position data
and 1 for the encoder number.
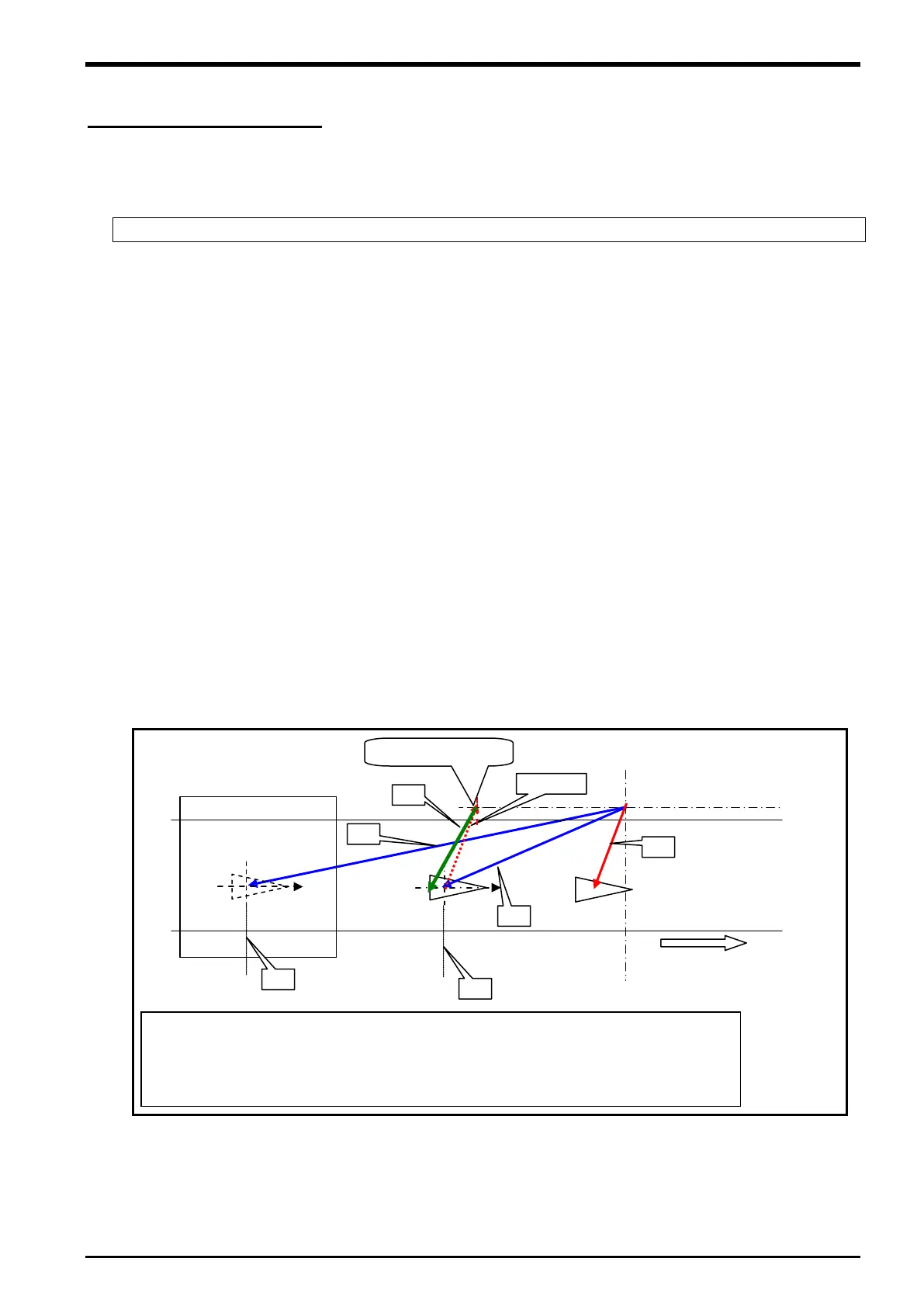
Describes the relationship of “TrBase” and “Trk” and “Mvs P2”.
Search area
of Vision sensor
Workpiece
movement direction
P0 : Teaching position in “C1” program.
P1 : Workpieace position when captured from vision sensor in
“CM1” program
P1c : Current Workpiece position. M1c : Current encoder value
M1 : Encoder value when captured fro
m vision sensor in “CM1” program
MELFA-BASIC V Instructions 19-89

 Loading...
Loading...



