9-52 Manual # 42-02-2223
Reference
Magnetek Quattro AC Quick Reference
This section includes quick reference information for the Magnetek Quattro AC Elevator drive
parameters. Please refer to the Magnetek drive manual provided with iControl for a detailed
explanation. Enter the settings you make while adjusting into the Field Setting column.
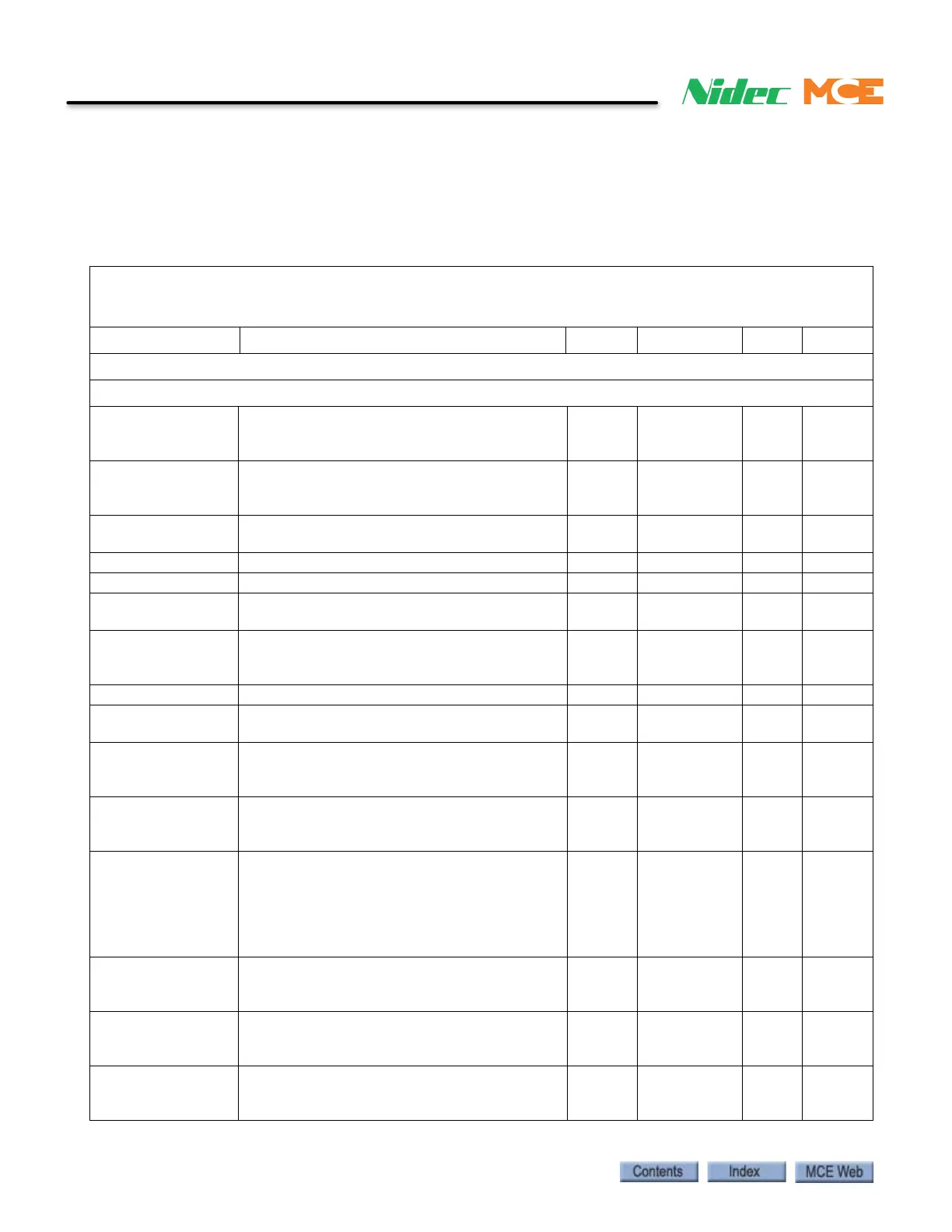
Table 10. Quattro PM Elevator Drive, iControl
WARNING: Do not change drive parameters while elevator is running. Incorrect drive parameters
can cause erratic operation. Parameters with an asterisk must be set correctly for specific motor/
machine / job. Refer to drive manual for detailed information.
Parameter Description Units Range Def Fac
Adjust A0
A1 Drive sub menu
CONTRACT CAR SPD Elevator Contract Speed fpm 0.0 – 1500.0 100.0 *
CONTRACT MTR SPD Motor Speed at elevator contract speed RPM 30.0 – 3000.0 50.0 *
RESPONSE Sets sensitivity of drive speed regulator in
terms of speed regulator bandwidth in radians
rad/sec 1.0 – 20.0 10.0 10.0
INERTIA Inertia /torque ratio as seen by the drive sec 0.25 – 50.00 2.00 2.00
INNER LOOP XOVER This parameter is used as a stiffness factor rad/sec 0.1 – 20.0 2.0 2.0
GAIN REDUCE MULT Percentage of “response” the speed regulator
should use in “low gain” mode
% 10 – 100 100 100
GAIN CHNG LEVEL When the HI/LO GAIN SRC in submenu C1 is
set to internal, the drive will control the high/
low gain switch
% of
rated spd
0.0 – 100.0 100.0 100.0
TACH RATE GAIN Reduces effects of rope resonance or stretch none 0.0 – 30.0 0.0 0.0
SPD PHASE MARGIN Sets phase margin of speed regulator assum-
ing a pure inertial load
degrees 45 – 90 80 80
RAMPED STOP TIME Used only by torque ramp down function dur-
ing a stop sets time to decrease motor rated
torque to zero.
sec 0.00 – 2.50 0.20 0.20
CONTACT FLT TIME Determines allowable time for motor contac-
tor feedback to be out of sync with com-
manded state before contactor FLT occurs.
sec 0.10 – 5.00 0.50 0.50
BRAKE PICK TIME If brake pick CNFM is set to internal time, this
parameter sets time the drive waits before it
assumes brake has been picked. If brake pick
CNFM is set to external TB, parameter sets
time drive waits receive a brake pick confir-
mation before a brake pick fault is declared
sec 0.00 – 5.00 1.00 0.0
BRAKE HOLD TIME Determines time drive will wait until a BRK
HOLD FLT is declared if a logic input is set to
MECH BRK HOLD
sec 0.00 – 5.00 0.50 0.10
OVERSPEED LEVEL Sets percentage of rated speed drive uses (in
conjunction with OVERSPEED TIME) to deter-
mine when an OVERSPEED fault occurs.
% of
contract
spd
90.0 – 150.0 115.0 115.0
OVERSPEED TIME Sets time drive can be at or above OVER-
SPEED LEVEL (A1), before it declares OVER-
SPEED FLT.
sec 0.00 – 9.99 1.00 1.00