6 Vector Control and Applied Functions
Multi-function Compact Inverter 3G3MX2-EV2 User’s Manual (I666-E1)
•
If the accuracy of the estimated position remains low and the motor still rotates during startup even
after you increase the PM Motor Initial Pole Position Estimation 0V Waiting Times (H131)/PM Motor
Initial Pole Position Estimation Detection Waiting Times (H132), increase the PM Initial Pole Position
Estimation Voltage Gain (H134) value to raise the voltage level of the detection signal.
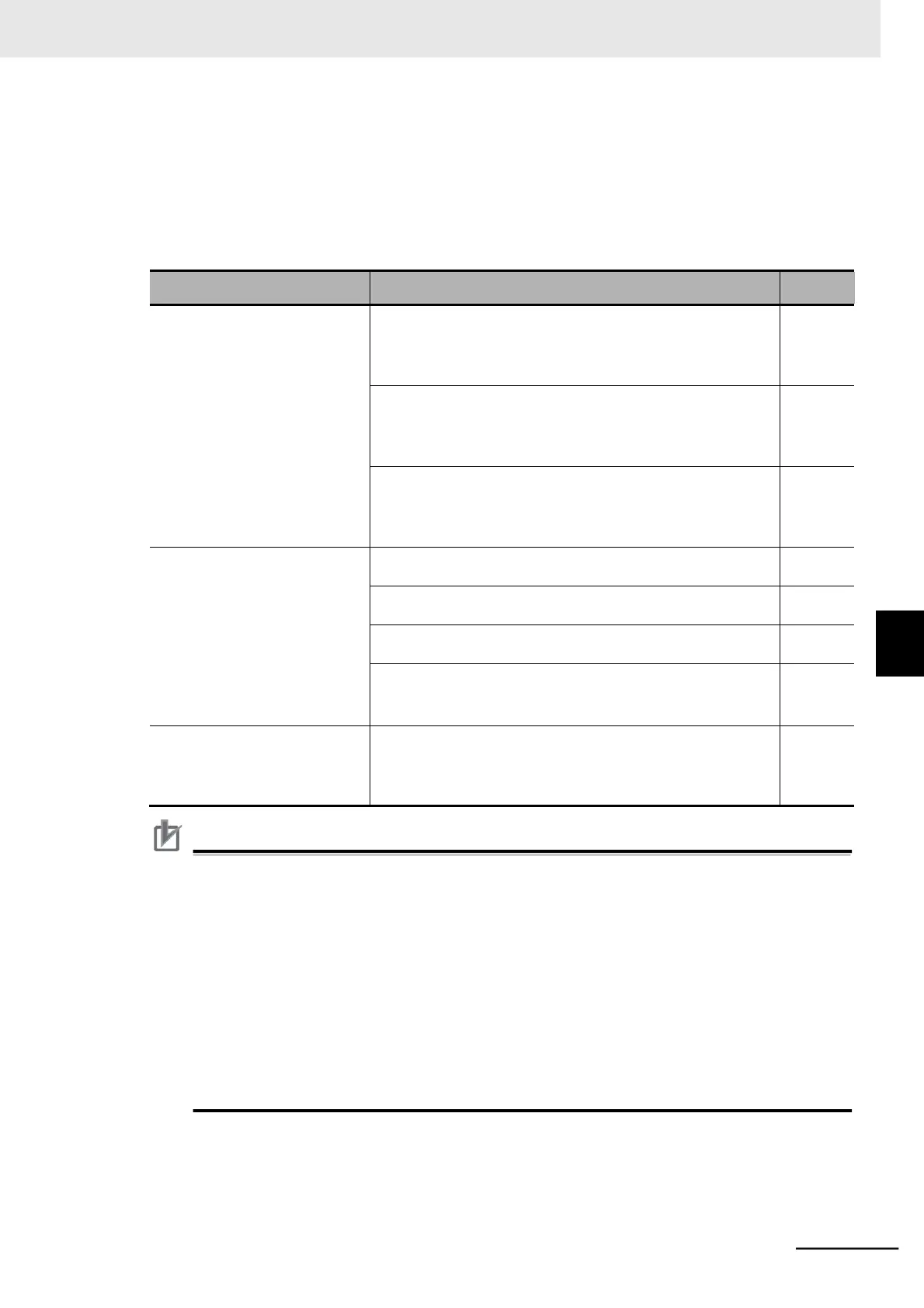
•
Depending on the phenomenon during startup, refer to the following table to adjust necessary motor
parameters.
Initial pole position estimation
time is too long.
Decrease the PM Motor Initial Pole Position Estimation 0V Wait-
ing Times value.
Decreasing the value too much may cause the motor to rotate
excessively for positioning or stall.
Decrease the PM Motor Initial Pole Position Estimation Detec-
tion Waiting Times value.
Decreasing the value too much may cause the motor to rotate
excessively for positioning or stall.
Decrease the PM Motor Initial Pole Position Estimation Detec-
tion Times value.
Decreasing the value too much may cause the motor to rotate
excessively for positioning or stall.
Motor rotates excessively for
positioning.
Increase the PM Motor Initial Pole Position Estimation 0V Wait-
ing Times value.
Increase the PM Motor Initial Pole Position Estimation Detection
Waiting Times value.
Increase the PM Motor Initial Pole Position Estimation Detection
Times value.
Gradually increase the PM Initial Pole Position Estimation Volt-
age Gain value.
Increasing the value too much may cause an overcurrent trip.
An overcurrent trip occurs.
Gradually increase the PM Initial Pole Position Estimation Volt-
age Gain value.
Decreasing the value too much may cause the motor to rotate
excessively for positioning or stall.
Precautions for Correct Use
•
Although high-tone sound occurs during startup when the PM Motor Starting Method Selec-
tion (H123) is set to 01 (Initial pole position estimation enabled), it is not a fault.
•
When the PM Motor Starting Method Selection (H123) is set to 01 (Initial pole position esti-
mation enabled), start the inverter with the motor stopped.
Starting the inverter with the motor rotation may cause the motor to rotate excessively for
positioning or stall.
•
For the DC injection braking power during magnetic pole positioning, if the PM Motor Starting
Current (H117) and DC Injection Braking Power (A057) values are different, then use the
larger value.
•
For the DC injection braking time during magnetic pole positioning, use the sum of the PM
Motor Starting Time (H118) and Startup DC Injection Braking Time (A058) values. The upper
limit is 60 seconds.
6-8-6 Adjustment of PM Motor Mode Settings