Page 145 of 254
The example, below, will illustrate the math involved.
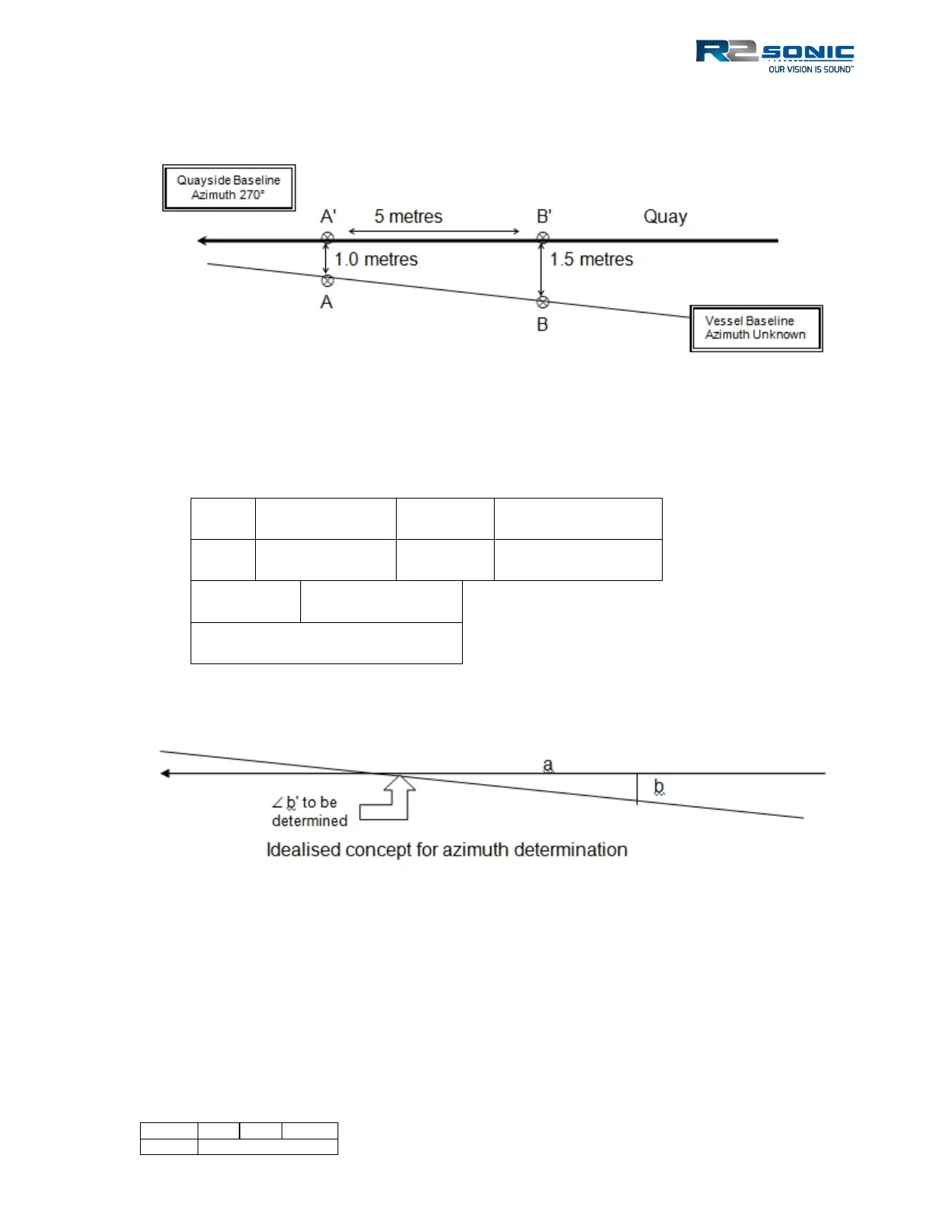
Figure 168: Gyro Calibration Method 2 example
Ship Azimuth = 270° + 5.7° = 275.7°
Table 17: Gyro Calibration Method 2 computation
Figure 169: Idealised concept of Gyro Calibration Method 2
In this example, the vessel heading for this set of readings is 275.7°; this would be compared to the
gyro reading recorded at the same time the offsets were measured.
In the above example, if the bow was further out from the quay than the stern, the angle b' would be
subtracted from the azimuth of the quay, i.e. 270° - 5.7° = 264.3°.