Page 163 of 254
APPENDIX V: The Patch Test
11 APPENDIX V: The Patch Test
11.1 Introduction
The alignment of the Sonic MBES sonar head to the motion sensor and gyro is critical to the accuracy
of the determined depths. It is not possible to install the sonar head in exact alignment with the
motion sensor and gyro to the accuracy required (x.xx°). If GPS time synchronisation is not used, the
latency of the position, as reported by the GPS, must also be measured during the calibration. This
being the case a multibeam calibration must be performed to measure the angular misalignment
between the Sonic MBES and the motion sensor and gyro and, if necessary, the position latency; this
is called the Patch Test.
The patch test is performed with each new installation or whenever a sensor is moved. In the case of
an over-the-side mount, a large number of calibration computations need to be performed to
determine how well the pole goes back into the same position each time it is deployed. With more
permanent mounting arrangements, a minimum of 5 separate patch tests should be conducted to
derive a standard deviation that would indicate the accuracy of the derived values.
The patch test involves collecting data over certain types of bottom terrain and processing the data
through a set of patch test tools. There are two primary methods of processing the data that are
currently used: an interactive graphical approach and an automatic, iterative surface match. Each of
these techniques has strengths and weaknesses, and the preferred approach is dependent on the
types of terrain features available to the surveyor. All modern multibeam data collection software
packages contain a patch test routine. Please read the software manual for explicit information
regarding the requirements for that software’s patch test. The below criteria is, in general, the norm
for a patch test.
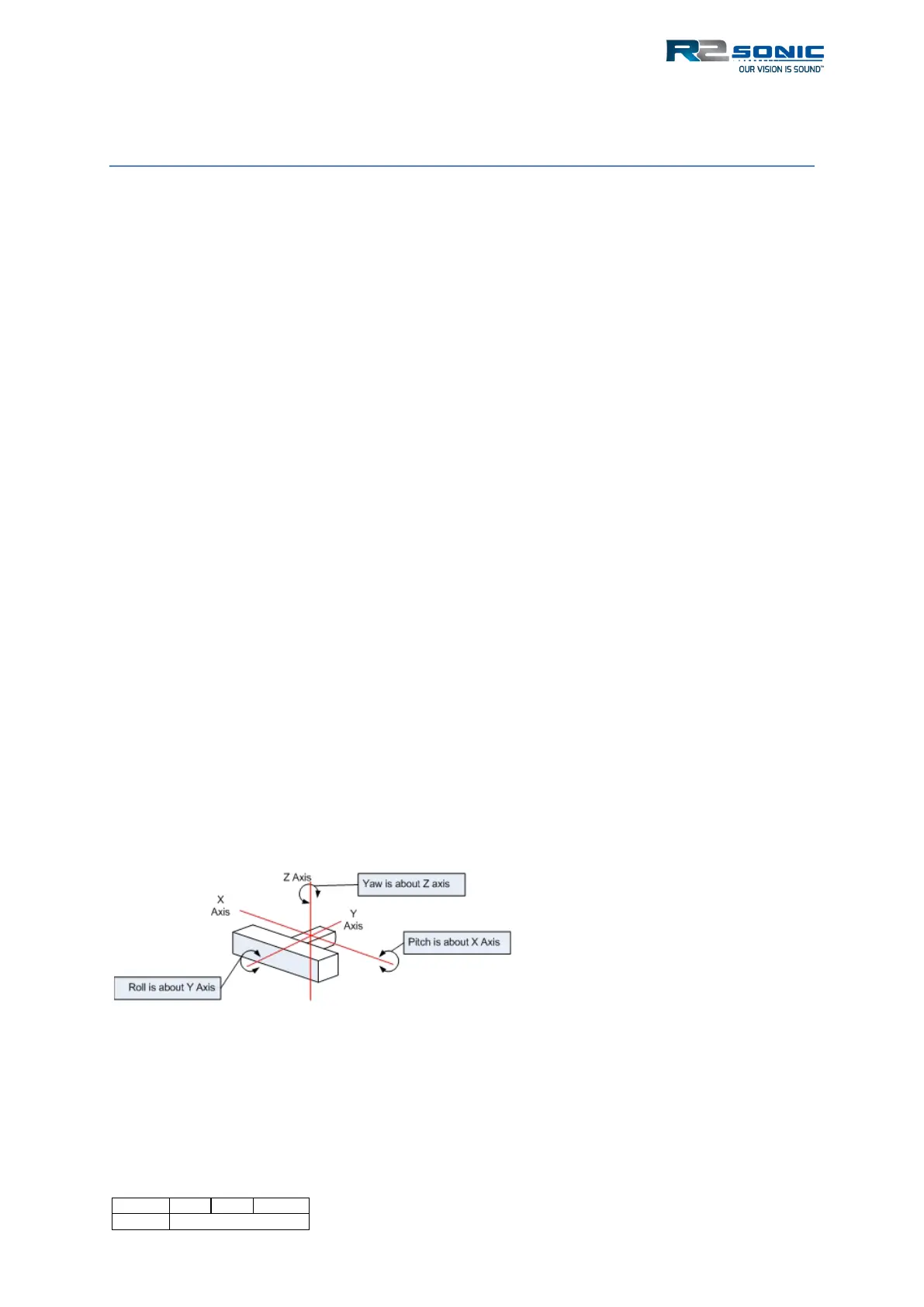
11.2 The orientation of the Sonic MBES Sonar Head
The orientation of the sonar head must be known to convert the measured slant ranges to depths
and to determine the position of each of the determined depths.
Any error in the measured roll of the
Sonic MBES sonar head can cause
substantial errors in the conversion from
slant range to depth. A roll error of 1°
on a 50 m slant range will cause a 0.6 m
error in the resulting depth. Any error in
the measured pitch of the Sonic MBES
head will primarily have a detrimental
effect on the accuracy of the positions that are determined for each slant range/depth.
A pitch error of 1° will cause an along-track error in the position of 0.4 meters when the sonar head
is 25 meters above the seabed.
Figure 177: Sonic MBES axes of rotation

 Loading...
Loading...