Page 81 of 254
5.6.10 Roll Stabilize and Pitch Stabilize
When a motion sensor is interfaced to the SIM, the data can be stabilised for the roll motion of the
vessel. With the advanced roll stabilisation, in the Sonic 2026/2024/2022, there is no need to stop
recording or go offline to change between roll stabilised and non-stabilised mode, nor is there a
need to go into the data collection software and identify the data as roll stabilised. The R2Sonic roll
stabilisation has been developed based on recommended methods from various data collection
software companies.
Roll stabilisation only works within the 160° maximum sector, any swath rotation or large sector size
(opening angle) that attempts to go beyond the 160° limit will cause the system to stop roll
stabilisation.
As stated in the SIM interfacing, it is recommended that the motion data be at the highest update
rate possible.
Pitch Stabilize is only available in the Sonic 2026 (and Sonic 2020). Enabling Pitch Stabilize will steer
the transmit pulse in such a way as to counteract the pitching of the vessel. This feature can be
enabled at any time, but it is intended for deeper water survey applications. The operating
frequency determines the range within which pitch stabilisation will be able to work.
The maximum steering angles for the 2020/2026, with pitch stabilization enabled, is given by the
following equation:
maxsteer = (10 degrees) * 400000 / frequency in Hertz
At 400kHz, the system can compensate for ± 10° of pitch. At 200kHz, it can compensate for ± 20°of
pitch. At 700kHz, this will decrease to about ± 5.7°of pitch.
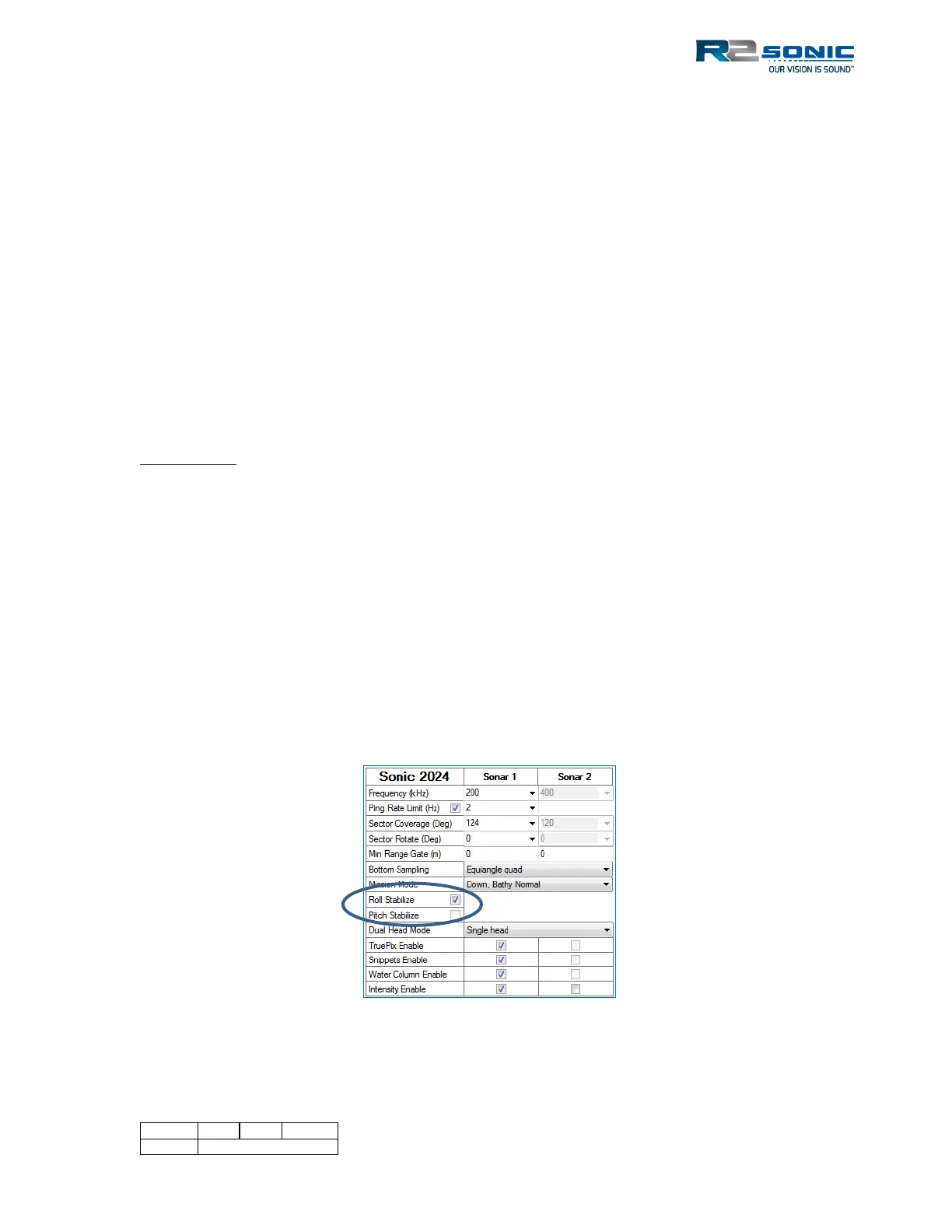
Figure 76: Roll and Pitch Stabilize