142 Rockwell Automation Publication 2080-UM002M-EN-E - April 2022
Chapter 8 Motion Control
These I/O can be configured through the axis configuration feature in
Connected Components Workbench. Any outputs assigned for motion should
not be controlled in the user program.
See Motion Axis Configuration in Connected Components Workbench
on
page 163.
IMPORTANT
If an output is configured for motion, then that output can no longer be
controlled or monitored by the user program and cannot be forced. For
example, when a PTO Pulse output is generating pulses, the
corresponding logical variable IO_EM_DO_xx will not toggle its value and
will not display the pulses in the Variable Monitor but the physical LED
will give an indication.
If an input is configured for motion, then forcing the input only affects
the user program logic and not motion. For example, if the input Drive
Ready is false, then the user cannot force Drive Ready to true by forcing
the corresponding logical variable IO_EM_DI_xx to be true.
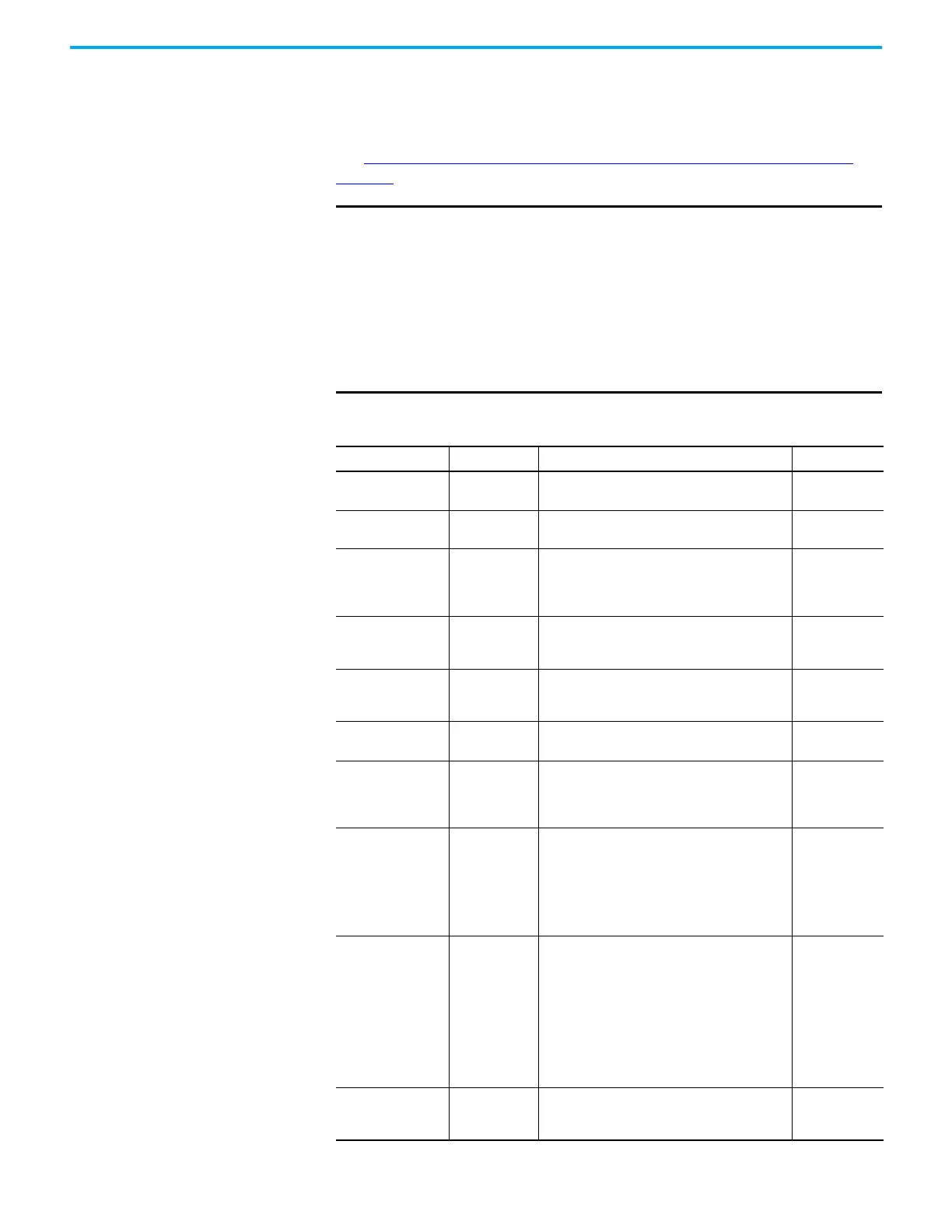
Motion Wiring Input/Output Description
Motion Signals Input/Output Description Uniqueness
PTO pulse OUTPUT
PTO pulse from the embedded fast output, to be
connected to Drive PTO input.
Not Shared
PTO direction OUTPUT
PTO pulse direction indication, to be connected to
Drive Direction input.
Not Shared
Servo/Drive On OUTPUT
The control signal used to activate/deactivate
Servo/Drive.
This signal becomes Active when MC_Power (on) is
commanded.
Can be shared
with more than
one drive
Lower (Negative)
Limit switch
INPUT
The input for hardware negative limit switch, to be
connected to mechanical/electrical negative limit
sensor.
Not Shared
Upper (Positive)
Limit switch
INPUT
The input for hardware positive limit switch, to be
connected to mechanical/electrical positive limit
sensor.
Not Shared
Absolute Home
switch
INPUT
The input for hardware home switch (sensor), to be
connected to mechanical/electrical home sensor.
Not Shared
Touch Probe Input
switch
INPUT
The input for hardware touch probe signal, to be
used with Motion MC_TouchProbe and
MC_AbortTrigger function blocks to capture axis
commanded position during the motion path.
Not Shared
Servo/Drive Ready INPUT
The input signal that indicates Servo/Drive is ready
to receive PTO pulse and direction signal from
controller.
No moving function blocks can be issued to an axis
before the axis has this signal ready if this signal is
Enabled in the motion axis configuration or axis
properties page.
Can be shared
with more than
one drive
In-Position signal
(from servo/motor)
INPUT
The input signal that indicates the moving part is
in the commanded position. This signal has to be
Active after the moving part reaches the
commanded position for MoveAbsolute and
MoveRelative function blocks.
For MoveAbsolute and MoveRelative function
blocks, when In_Position is enabled, the controller
will report an error (EP_MC_MECHAN_ERR) if the
signal is not active within 5 seconds when the last
PTO pulse sent out.
Not Shared
Home Marker INPUT
This signal is the zero pulse signal from the motor
encoder. This signal can be used for fine homing
sequence to improve the homing accuracy.
Not Shared

 Loading...
Loading...





