Rockwell Automation Publication 2080-UM002M-EN-E - April 2022 169
Chapter 8 Motion Control
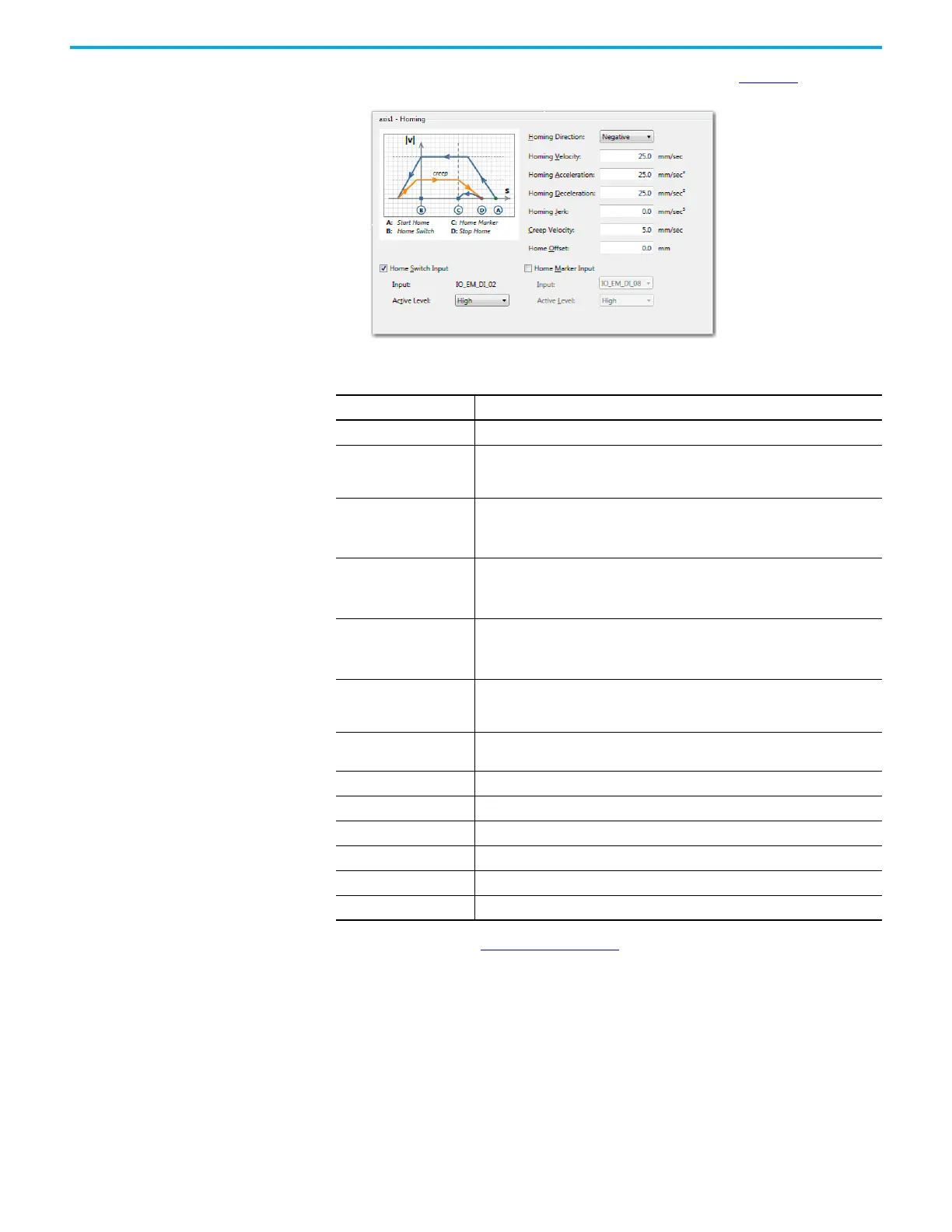
4. Set Homing parameters based on the description in Table 20. Click
Homing.
Table 20 - Homing Parameters
Parameter Value Range
Homing Direction Positive (clockwise) or negative (counterclockwise).
Homing Velocity
(1)
(1) The parameter is set as REAL (float) value in Connected Components Workbench. To learn more about conversions and
rounding of REAL values, see Real Data Resolution on page 170.
Range: 1…100,000 pulse/sec
Default: 5,000.0 pulse/sec (25.0 mm/sec)
NOTE: Homing Velocity should not be greater than the maximum velocity.
Homing Acceleration
(1)
Range: 1…10,000,000 pulse/sec
2
Default: 5000.0 pulse/sec
2
(25.0 mm/sec
2
)
NOTE: Homing Acceleration should not be greater than Maximum Acceleration.
Homing Deceleration
(1)
Range: 1…10,000,000 pulse/sec
2
Default: 5000.0 pulse/sec
2
(25.0 mm/sec
2
)
NOTE: Homing Deceleration should not be greater than Maximum Deceleration.
Homing Jerk
(1)
Range: 0…10,000,000 pulse/sec
3
Default: 0.0 pulse/sec
3
(0.0 mm/sec
3
)
NOTE: Homing Jerk should not be greater than Maximum Jerk.
Creep Velocity
(1)
Range: 1…5,000 pulse/sec
Default: 1000.0 pulse/sec (5.0 mm/sec)
NOTE: Homing Creep Velocity should not be greater than Maximum Velocity.
Homing Offset
(1)
Range: -1073741824…+1073741824 pulse
Default: 0.0 pulse (0.0 mm)
Home Switch Input Enable home switch input by clicking the checkbox.
- Input Read-only value specifying the input variable for home switch input.
- Active Level High (default) or Low.
Home Marker Input Enable the setting of a digital input variable by clicking the checkbox.
- Input Specify digital input variable for home marker input.
- Active Level Set the active level for the home switch input as High (default) or Low.

 Loading...
Loading...





