70
60
50
40
30
20
10
0
0,1 0,2
12
6
18
24
30
36
42
48
54
60
0,3 0,4 0,5 0,6 0,7 0,8 0,9 1
v
bo
x
(m/sec)
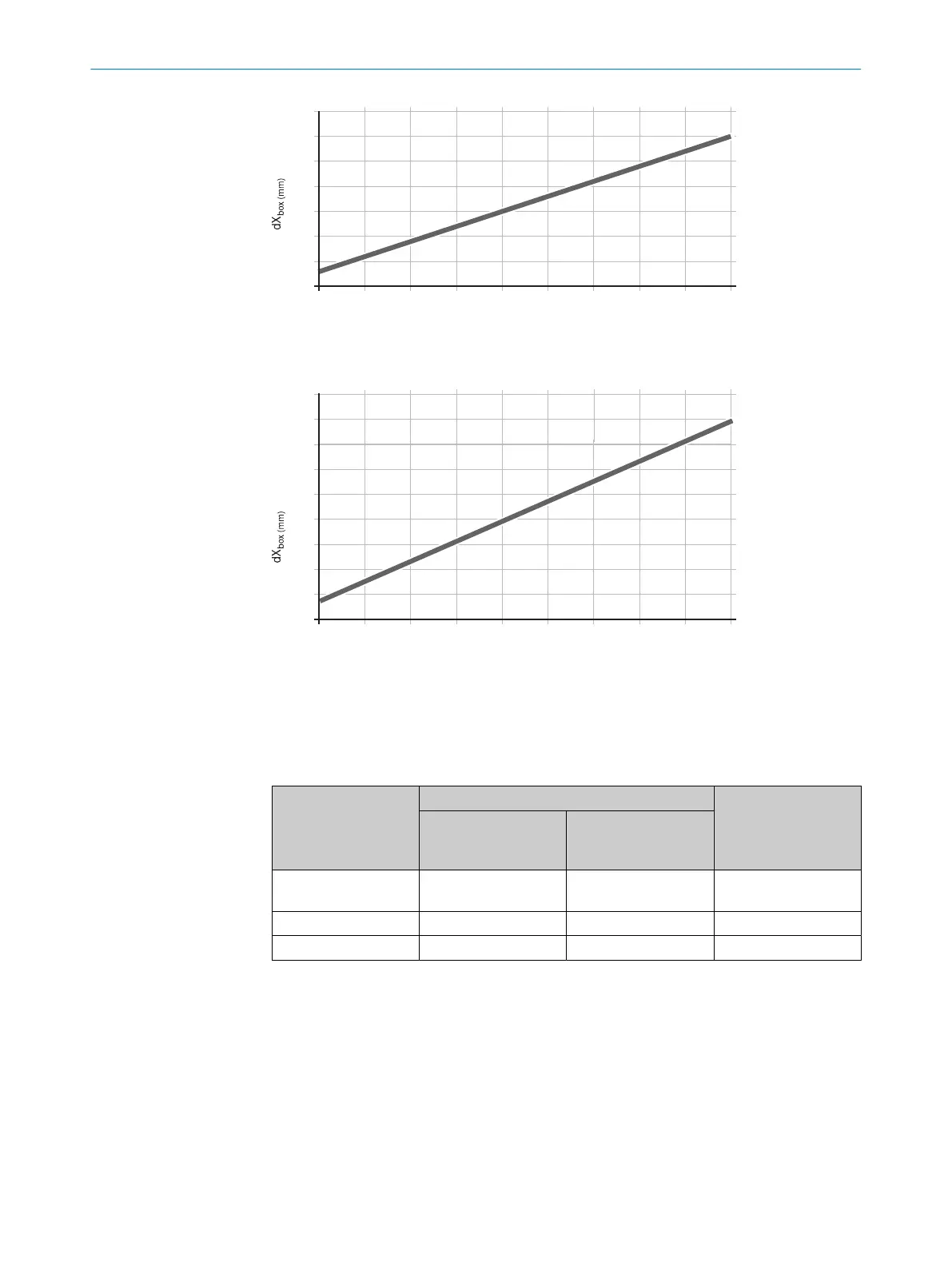
Figure 27: Lateral object edge tolerance for an uncoded system
35
30
25
20
15
10
5
0
0,1 0,2
8
4
16
20
0,3 0,4 0,5 0,6 0,7 0,8 0,9 1
v
bo
x
(m/sec)
40
45
40
28
24
36
32
12
Figure 28: Lateral object edge tolerance for a coded system
T
he upper and lower object edge tolerance depends on the reduced resolution, see
table 17, page 50.
Table 17: Upper and lower object edge tolerance depends on the reduced resolution
Reduced resolution Upper object edge tolerance Lower object edge tol‐
eranc
e
Increasing object
hei
ght of the passing
object
Decreasing object
height of the passing
object
Reduced resolution
deactivated
At least 10 mm At least 10 mm At least 10 mm
1 beam At least 20 mm At least 10 mm At least 10 mm
2 beams At least 30 mm At least 10 mm At least 10 mm
Object speed
T
he object may move through the protective field at a speed of 0.1 m/s ... 1.0 m/s. At
higher speeds, reliable human-material differentiation is not guaranteed.
Object distance and object width
T
he objects are reliably detected if a minimum distance of 10 mm ... 100 mm is
maintained between 2 consecutive objects and the objects have a minimum width of
10 mm ... 100 mm. The values depend on the object speed.
4 P
ROJECT PLANNING
50
O P E R A T I N G I N S T R U C T I O N S | deTec4 8021645/1EB0/2022-04-28 | SICK
Subject to change without notice