MOC0
PFH
D
6 × 10
–9
PFD
a
vg
4 × 10
–4
Minimum movement for error detec‐
t
ion
≥1 sine-cosine period,
at least 1 × within 24h
Supplementary troubleshooting measures
For encoders with Sin/Sin_Ref and
C
os/Cos_Ref
Required, see the “Limits of sine-cosine analog voltage
monitoring” section of the “Flexi Soft in the Flexi Soft
Designer Configuration Software” operating instructions
For encoders with Sin+/Sin– and
Cos+/Cos–
Not required
General safety technology parameters
T
M
(mis
sion time, ISO13849) 20 years
1)
Typically, in accordance with generally accepted test principles set out by testing authorities, the require‐
ment here is that provision must be made in the application to ensure that the unit to be monitored
executes a movement at least once within 24 hours. This movement must trigger a signal change at the
encoder system on the basis of which the errors to be considered are detected.
2)
Sin_Ref and Cos_Ref are DC voltage, typically 2.5VDC.
3)
E.g., joint use of the encoder signals for the electronic switching of the drive system.
4)
Sin– and Cos– are the inverted voltage of Sin+ and Cos+ respectively.
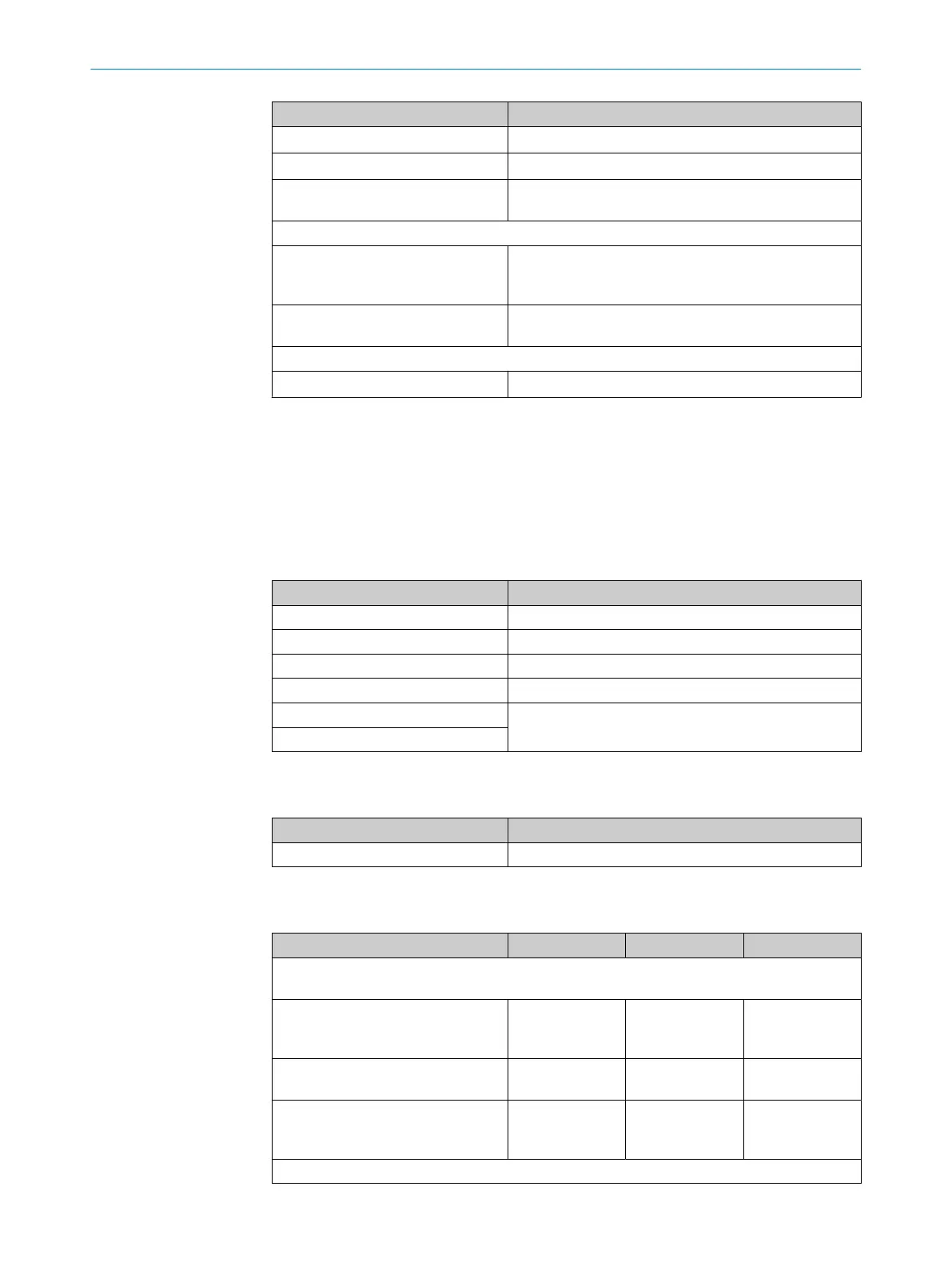
General data
T
able 164: MOC0 general data
MOC0
Protection class (IEC61140) III
Immunity to interference EN 61000-6-2
Emitted interference EN 61000-6-4
Connection type Micro-D-Sub male connector, 15-pin
Power consumption Max. 2.5W
Power loss
Interfaces
T
able 165: Interfaces MOC0
MOC0
Data interface Internal bus (FLEXBUS+)
Electrical data
Table 166: Encoder connection at MOC0
Minimum Typical Maximum
General values
(ENCx_A+, ENCx_B+, ENCx_C+, ENCx_A–, ENCx_B–, ENCx_C–, ENC_0V
)
Input resistance in the case of con‐
f
iguration for SSI encoders or A/B
incremental encoders
1
35 kΩ – –
Input resistance in the case of con‐
figuration for sine-cosine encoders
2
0.9 kΩ 1 kΩ 1.1 kΩ
Differential resistance in the case
of conf
iguration for SSI encoders or
RS-422 A/B incremental encoders
3
100 Ω 120 Ω 150 Ω
Encoder power supply (ENC1_24V, ENC2_24V, ENC_0V)
TECHNICAL DATA 12
8012478/1IG6/2023-02-24 | SICK O P E R A T I N G I N S T R U C T I O N S | Flexi Soft Modular Safety Controller
155
Subject to change without notice