4.2.7 Obstacles
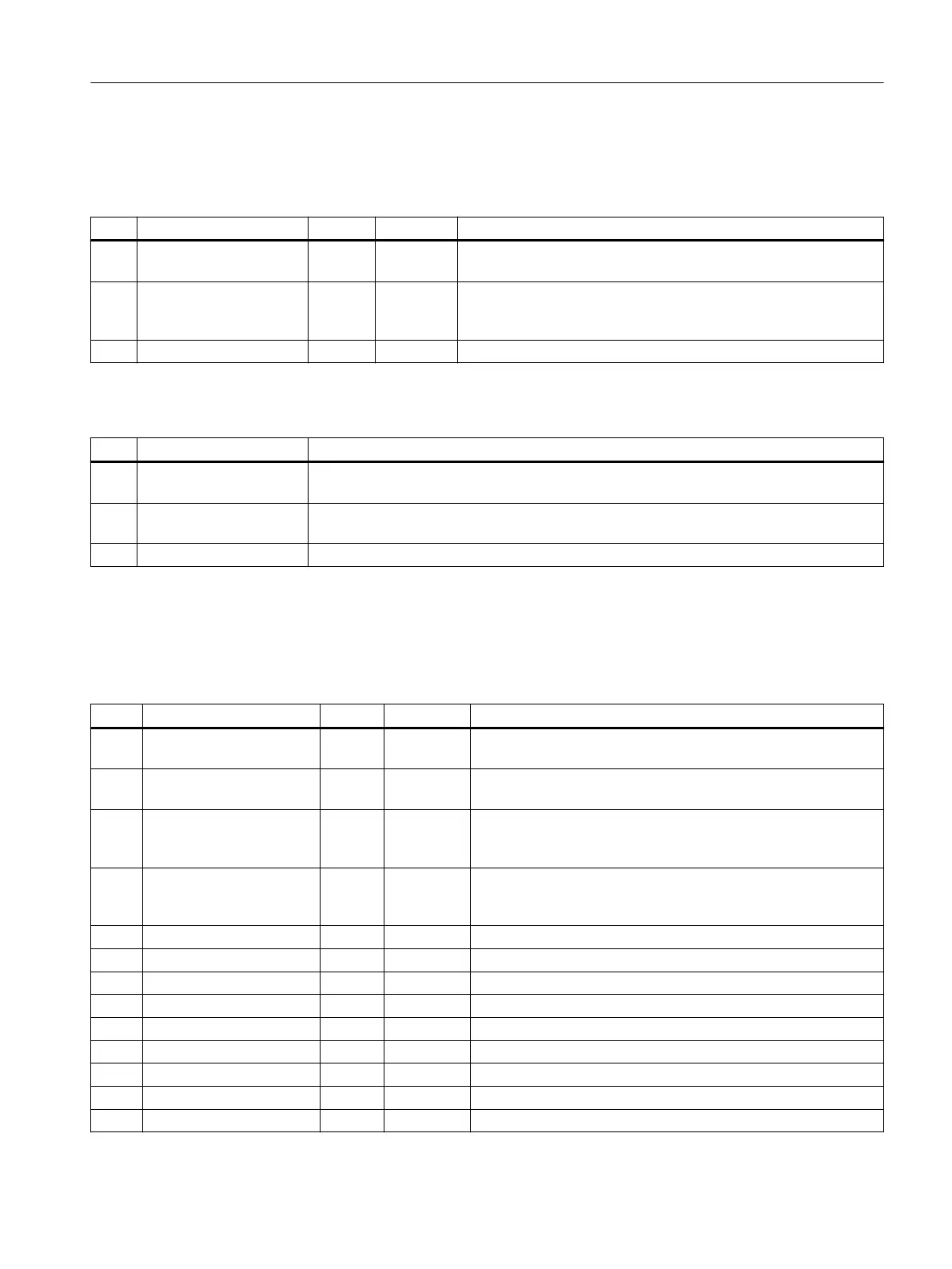
Table 4-32 SIMOTION → SIMATIC S7, Obstacles
PZD Signal name Unit Format Remark
1 ZSW1_Obstacles_PLC - WORD Status word
See table below
2 NUMBER_OBST - INT Number of obstacle regions
Number of externally learned variable obstacle regions + number
of internally learned obstacle regions
3-32 - Reserved
Table 4-33 Status word ZSW1_Obstacles_PLC
Bit Signal name Remark
0 PRG_OBST_OK Obstacle regions programmed
Confirmation from the PRG_OBST control bits. The obstacle regions have been stored.
1 OBST_DELETED Obstacle regions deleted
Confirmation from the DEL_OBST control bits. The obstacle regions have been deleted.
2-15 - Reserved
4.2.8 AddData
Table 4-34 SIMOTION → SIMATIC S7, AddData 1
PZD Signal name Unit Format Remark
1 TR_SETPOINT_SPEED mm/s Int Interpolated set velocity of trolley
The interpolated set velocity that is transferred to the drive
2 HO_SETPOINT_SPEED mm/s Int Interpolated set velocity of hoist
The interpolated set velocity that is transferred to the drive
3-4 TR_FINAL_TARGET mm Dint Final target position of trolley
If the specified target cannot be approached exactly (blocked
region), the target is changed internally.
5-6 HO_FINAL_TARGET mm Dint Final target position of hoist
If the specified target cannot be approached exactly (blocked
region), the target is changed internally.
7 - Reserved
8 CAMERA_X mm Int Camera deflection in X direction
9 CAMERA_Y mm Int Camera deflection in Y direction
10-11 CAMERA_Z mm Dint Camera hoist position
12 CAMERA_VX mm/s Int Camera pendulum velocity in X direction
13 CAMERA_VY mm/s Int Camera pendulum velocity in Y direction
14 CAMERA_SKEW cgr Int Camera reflector rotation
15 CAMERA_VSKEW cgr/s Int Camera velocity of rotation
16 - Reserved
Communication interface to SIMATIC S7
4.2 SIMOTION D for AddOn → SIMATIC S7
SC integrated STS, GSU
Operating Instructions, 07/2019, A5E48271265B AA 107
 Loading...
Loading...